5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年)
标题: mwc飞控设置出现问题,求帮助 [打印本页]
作者: 黄家卫队 时间: 2015-1-30 08:38
标题: mwc飞控设置出现问题,求帮助
能不能翻译一下这下面是什么意思,看不懂,并且我不小心点了重置键,全部都变红了,只有解会变绿,该怎么办?
(, 下载次数: 18)
这个是解锁的
(, 下载次数: 20)
作者: 黄家卫队 时间: 2015-1-30 08:41
貌似有点明白了
看到隔 壁有这个:
连接好飞控打开GUI,如图: 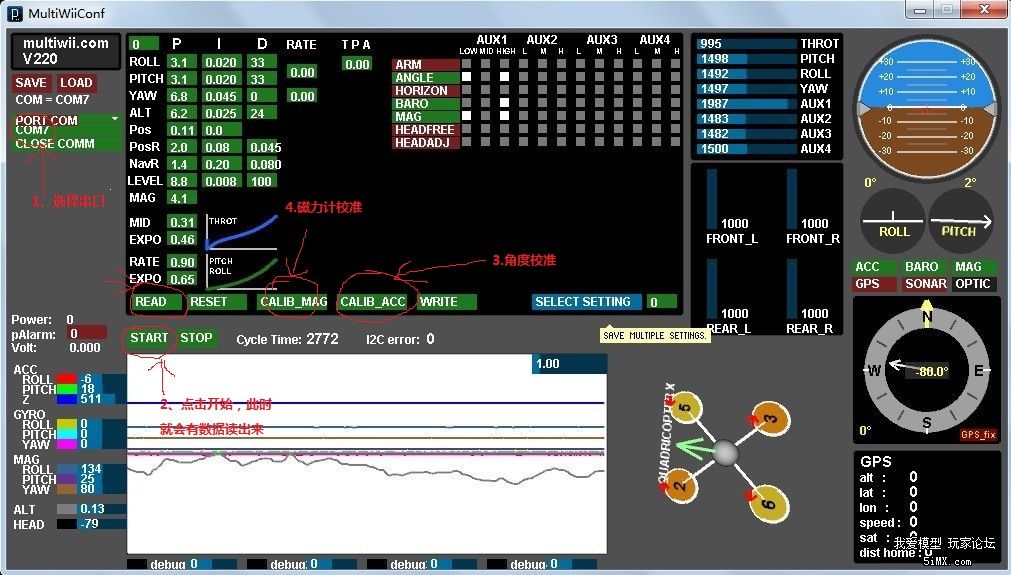
名词解释:
angel:自稳模式,摇杆回中后自动保持水平
horizon:介于全手动与自稳之间,摇杆回中时保持当前状态
BARO:气压定高
MAG:地磁方向锁定,即不动摇杆时方向保持,不会被外部风力影响
CAMSTAB:云台控制
ARM:解锁
HEADFREE:无头模式,例如在解锁前,方向与控一致时,解锁后,无论如何自旋,控的方向与解锁前一致
HEADADJ:重新指定无头模式的方向,需看清当前的头尾方向,按当前方向确定无头模式
首先是遥控器摇杆正反向检查和舵量调整。打开遥控器。看上图
1、推油门【THROTTLE状态条向右运动】收油门【THROTTLE状态条向左运动】
2、推俯仰【PITCH 状态条向右运动】 拉俯仰【PITCH 状态条向左运动】
3、副翼打左边【ROLL 状态条向左运动】 副翼打右边【ROLL 状态条向右运动】
4、方向舵打左边【YAW 状态条向左运动】 方向舵打右边【YAW 状态条向右运动】
5、如果您接收机与飞控连接了AUX1为某开关通道,请拨动此开关注意GUI里的AUX1状态条同样有变化。
以上操作如果出现反向的请您设置遥控器通道反向以实现上面的动作要求。
其次就要调整遥控器的舵量。
1、当所有通道在中立点的时候查看GUI窗口里数值是不是在1500左右【数值偏差+ - 5】
2、当所有通道在最低点的时候查看GUI窗口里数值是不是在1095左右【数值偏差+ - 5】
3、当所有通道在最高点的时候查看GUI窗口里数值是不是在1905左右【数值偏差+ - 5】
如果您在操作遥控器摇杆的时候,不是以上数值请您修改遥控器舵量设置并达到以上动作要求。
下面是对传感器的校准
如上图 校准飞控各个传感器
点击CALIB_ACC 10秒后加速度传感器校准成功。 再点击CALIB_MAG 后有你有30秒来旋转电路板, x,y,z轴至少360度 这时飞控板LED1灯闪烁,闪烁停止三轴电子罗盘校准完成】
此时校准完成。
pid保持默认值即可飞行。注意:遥控器一定要选择固定翼模式!!!
PID扫盲:
· P(比例):这是一个增益因子,当多轴飞行器受风等的影响发生向一边倾斜时,P值直接决定多轴飞行器的抵抗这种倾斜的力的大小。P越大,多轴飞行器抵抗意外倾斜的能力越强,但P过于大时会引起多轴飞行器抖动甚至猛烈侧翻。P越小,多轴飞行器抵抗意外倾斜的能力越弱,但P过小时会引起多轴飞行器自平衡能力不足甚至朝一边侧翻(如顺着风的方向)。
· I(积分):这个参数决定了飞行控制器对过往飞行状态的依赖程度。如果I值太小,会使飞行器过度依赖当前的误差,不能抑制“过敏”现象,从而造成飞行颠簸;如果I值太大,则会过度削弱系统对误差的反应能力,造成反应迟缓。
· D(微分):一旦多轴飞行器发生倾斜,则认为多轴飞行器会继续向同一方向倾斜,合适的D参数的能有效抑制未来可能发生的倾斜。如果D值太小,您会觉得多轴飞行器反应不够灵敏;如果D值太大,也会引起“过敏”。相较于P而言,D反映得更多的是灵敏度,而P反映的是纠正误差的力度。
默认参数找个草坪,可以试飞了,飞之前最好进行一下遥控器的传感器校准,校准方法根据你遥控器油门型号,在百度可以找到。
作者: 黄家卫队 时间: 2015-1-30 09:16
已解决
| 欢迎光临 5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年) (http://5imx.com/) |
Powered by Discuz! X3.3 |