5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年)
标题: 航模直流无刷无感电机调速控制系统设计【资料】 [打印本页]
作者: unclebiao 时间: 2006-10-26 08:29
标题: 航模直流无刷无感电机调速控制系统设计【资料】
针对航模用无传感器无刷直流电机的特点,设计开发了其专用调速控制系统。首先分析了无传感器无刷直流电机的位置检测方法、PWM调制方式和启动策略等控制原理。接着以MEGA8单片机为核心设计了硬件系统,对几个关键控制电路给出了原理图并进行了详细阐述。最后还给出了系统控制多种航模用电机的测试结果。
http://www.mx3g.com/viewthread.php?tid=216&extra=page%3D1
作者: sl81 时间: 2006-10-28 16:53
资料没了??
作者: shingosu 时间: 2006-10-28 19:46
又给人删了
作者: dxwhc 时间: 2006-11-5 21:58
为啥没有了呢。我正在找呢:em25:
作者: kyosh 时间: 2006-11-7 22:54
标题: 为什么删掉,也不解释下
作者: houerlovett 时间: 2006-11-7 23:13
为什么删 ??
难道涉及商业秘密了??
作者: qqq_wd002 时间: 2006-12-23 01:23
迷糊 就这帖也删?
作者: 依然爱我 时间: 2006-12-23 12:11
啊 好象资料 不错 就是没看见 为什么要擅长呢 ??:em17:
作者: kisala 时间: 2006-12-25 03:59
标题: 连ID都禁了??
:em16: :em16:
作者: 中原剑客 时间: 2006-12-25 09:44
晕
什么都没有了
作者: 狐狸 时间: 2006-12-25 10:51
标题: 我帮贴,斑竹看大家都在找,就不要删啦
我帮贴,斑竹看大家都在找,就不要删啦
航模直流无刷无感电机调速控制系统设计
航模用无刷直流电机(BLDCM)具有体积小、重量
轻、效率高和可靠性高等优点,由于航模领域的特殊
性,对于电机的控制系统也提出了一些特殊的要求,其
中最重要的就是要求控制系统的体积小、质量轻。这
就要求设计者在设计控制电路时必须使用较少的元器
件和较简单的电路。
关于无传感器无刷直流电机控制系统的研究很
多,其中文献[ 1 ]提出了使用MC68HC908GP32芯片为
核心的无传感器无刷直流电机控制应用策略; 文献
[ 2 ]提出了一种基于DSP的无传感器无刷直流电机控
制方法,借助于DSP的强大运算处理能力,完全由软
件实现反电势过零检测换相和开环起动。这些方法均
能实现对电机的控制,但是在电路设计上都比较复杂,
与航模用无刷电机控制系统电路设计简单的要求相矛
盾。本设计是以MEGA8单片机为核心的无刷直流电
机控制系统,该系统充分发挥MEGA8单片机的特点,
外围控制电路十分简单。
[ 本帖最后由 狐狸 于 2006-12-25 10:56 编辑 ]
作者: 狐狸 时间: 2006-12-25 10:51
1 无传感器无刷直流电机控制简介
目前常用的无刷直流电机控制方法可分为3类:
开环控制,转速负反馈控制和电压负反馈加电流正反
馈控制。其中开环控制方式适合于转速精度要求不高
的场合,转速负反馈方式适合于机械特性要求比较硬、
转速精度比较高的场合,而电压负反馈电流正反馈方
式则应用于动态性能要求比较高的场合。航模用的无
刷直流电机对于转速精度要求并不很高,使用开环控
制方式就可满足要求。
图1是无刷直流电机的电路原理图[ 3 ] 。采用二相
导通星形三相六状态控制策略时,其工作过程如下:
t = 0°电流:电源+ →T1→U→V→T4→电源-
t = 60°电流:电源+ →T1→U→W→T6→电源-
t = 120°电流:电源+ →T3→V→W→T6→电源-
t = 180°电流:电源+ →T3→V→U→T2→电源-
t = 240°电流:电源+ →T5→W→U→T2→电源-
t = 300°电流:电源+ →T5→W→V→T4→电源-
t = 360°电流:电源+ →T1→U→V→T4→电源-

图1 无刷直流电机的电路原理图
由此可看出,只要转子在合适的位置及时准确地
· 0 3 · 《测控技术》2006年第25卷第7期
切换相应的开关管进行换流,电机就能平稳旋转并获
得最大的转矩。
作者: 狐狸 时间: 2006-12-25 10:52
2 系统设计
2. 1 总体设计
如前所述,在航模电机调速控制系统中,对设计者
最大的挑战就是如何使用简单的电路,较少的元器件,
在有限的空间里设计出高效、可靠的控制系统。因此
作者选用了MEGA8 单片机作为系统控制核心,在电
机驱动部分使用P沟道和N沟道配合的全桥驱动电
路。对于一些既可以使用硬件电路实现,又可以使用
软件程序实现的功能,在设计中将权衡两者在实现中
的速度、精度和复杂程度,做出合理的选择。
航模电机调速控制系统具有以下功能:
①电机速度控制信号的检测;
②三相直流无传感器无刷电机的调速控制;
③电池电压检测。
2. 2 硬件设计
系统硬件框图如图2所示(其中虚线部分只在开
发调试中使用) 。

图2 系统硬件框图
2. 2. 1 MEGA8单片机简介
MEGA8单片机内部集成了8 KB的FLASH,具有
丰富强大的硬件接口电路,但由于采用了小引脚封装,
所以价格与低档单片机相当,因此具有极高的性价比。
当工作在16 MHz时,具有16M IPS的性能,完全可以
适合无传感器无刷直流电机的控制需求。带TQFP封
装的MEGA8单片机具有2通道8位A /D转换,可以
胜任电池电压检测这种对精度没有苛刻要求的功能。
MEGA8最多有23个可编程的I/O口,可任意定
义I/O口的输出和输入方向。输出时为推挽输出,驱
动能力强,可直接驱动大电流负载。输入口可定义为
三态输入、带内部上拉电阻输入,具有一定的灵活性,
且可以简化外部电路。
另外,MEGA8支持ISP功能,在程序设计、调试时
可以很方便地对器件进行在线编程、修改,而不需要使
用专用设备。
2. 2. 2 反电势过零检测电路设计
无位置传感器无刷直流电机控制的一个关键点就
是电机转子位置信息的检测与估计。作者在设计中使
用了反电动势过零法[ 4 ]对转子位置进行检测。该方
法具有线路简单、技术成熟、成本低廉等优点,当然也
存在电机不转及转速很低时,反电势无法检测的缺点。
对于这些不足,作者使用了软件优化等方法予以克服。
反电势过零法的工作原理如图3所示:在任何时
刻,电动机三相绕组只有两相导通,每相绕组正反相分
别导通120°电角度。通过测量三相绕组端子及中性
点相对于直流母线负端(或正端)的电位,当某端点电
位与中性点电位相等时,则此时刻该相绕组反电动势
过零,再过30°电角度就必须对功率器件进行换相。
据此可设计过零检测及移相(或定时)电路,从而得到
全桥驱动6个功率器件的开关顺序。
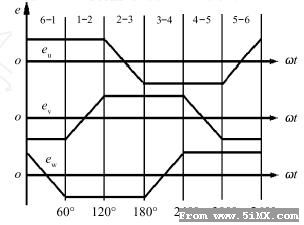
图3 反电势过零法的工作原理
由电机学原理[ 3 ]可得:三相的反电势过零检测方
程为(以U相为例)
作者: 狐狸 时间: 2006-12-25 10:53
MEGA8具有AD转换电路,可以直接将待检测的
电路接入ADC端口,检测电压的值,但是对于反电势
过零法而言,要获得的并不是具体的反电势电压值,而
只是反电势的过零点,因此如果直接使用MEGA8 的
AD功能,虽然在电路上是简化了,但是在软件的编制
上却带来了很大的问题,首先AD采样不仅使软件程
序编制复杂,而且运行AD采样将占用过多的MCU运
行时间,降低程序的实时性。而实际上只需要根据式
(1)确定反电势符号改变的时刻,就可以认为检测到
过零点。因此在设计中采用了专门的过零点检测电
路,使用简单的硬件电路解决软件AD采样和电压比
较的复杂过程。实际电路如图4 所示(U 相电路) 。
当截止相U反电势到达过零点时, LM339将产生一个
脉冲。
根据式(1) ,当反电势为零时有2uU = uV + uW , 从
图中可见,当uU从+ → - 过程中, outputU 处产生一个
下降沿脉冲,当uU 从- → +过程中, outputU 处产生一
个上升沿脉冲。单片机通过检测脉冲的变化,即可得
到过零点的位置。
2. 2. 3 电机驱动电路设计
对于永磁无刷直流电机,从图3中可见,每一个周
· 1 3 · 航模直流无刷无感电机调速控制系统设计
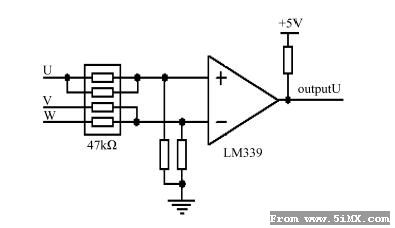
图4 反电势检测电路(U相)
期由6个60°的扇区组成,每个元件导通120°,即在两
个连续的扇区中导通。因此有2 种PWM调制方式:
半桥载波和全桥载波。对于永磁直流电机而言,无论
是上半桥载波还是下半桥载波,截止相都会产生续流,
导致其余两相电流产生波动,电机转速越高,相应的波
动也就越大。而采用全桥载波,则始终有两相导通,截
止相不会产生续流,电流波动和转矩脉动都较小。当
然全桥载波也有不足之处,全桥载波时功率管的开关
损耗是半桥载波方式的2倍。
在本设计中电机的驱动采用全桥驱动电路,使用
一对P沟道和N沟道的POWER MOSFET控制。电路
如图5 所示。MEGA8 单片机具有3 个硬件PWM通
道,可以实现任意< 16位、相位和频率可调的PWM脉
宽调制输出,因此在设计中直接使用硬件PWM功能。
从速度和精度上来讲,硬件PWM都优于软件PWM,
而且使用硬件PWM不仅不需要增加外围电路,还可
以减少软件编程的难度。

图5 电机驱动电路(U相)
作者: 狐狸 时间: 2006-12-25 10:53
2. 3 软件设计
2. 3. 1 电机启动策略
对于电机的启动,作者在设计中使用了软件启动
法:在电机静止和低速运行时,其反电势为零或极低,
无法检测,因此采用外同步起动的方法。在电机起动
时,先在某相加电压,然后检测过零点,若检测到过零
点,就提前切换,如果检测不到就延时一段时间再切
换。以此来使电机转速逐渐升高,当反电势足够大时,
则进入正常运转方式。
2. 3. 2 调速控制程序
由于使用反电势过零法实现电机的驱动,电机的
控制将完全依赖于MEGA8的控制程序。当电机高速
运转时(最高可达60 000 r /min) ,电机的换相必须在
很短的时间内完成。这就要求电机控制程序的算法简
短、精确并高效。
电机调速控制信号的周期通常在1 100~1 900μs
之间。程序使用MEGA8内部定时器作为检测调速信
号的基准时钟。当MEAGE8工作在16 MHz, 定时器
工作在8分频的模式下时,定时器的时间精度为0. 5
μs,程序检测控制信号的精度达到0. 5%。
电机调速控制信号的检测在外部中断程序中完
成,如图6所示。外部中断程序检测调速控信号的上
升沿与下降沿,根据基准时钟计算出脉冲时间,然后设
置PWM的占空比。
电机的换相控制在程序主流程中完成,如图7所
示。程序以三相六状态循环的方式工作。当进入一个
状态的控制阶段时,程序首先根据上一次换相的时间,
估算本次过零点时间,然后等待检测反电势过零点。
当检测到准确的过零点时间后,程序计算出本次换相
点理论时间(30°换相时间) 。随后根据设置的参数对
换相时间做修正,以发挥电机的最大工作效率。当换
相时间到达时,程序切换MOSFET管的通断状态,然
后进入下一状态的控制阶段。

图6 调速信号检测流程图 图7 电机换相控制流程图
作者: 狐狸 时间: 2006-12-25 10:54
2. 3. 3 软件保护措施
航模在实际使用中经常会发生电池电压过高或过
低、控制信号中断、电机堵转等意外情况。电池电压过
高或过低可能会导致控制板电路无法正常工作。电机
堵转可能会造成电池或电机的烧毁。因此作者在设计
控制程序时加入了很多的保护措施:
①在电机启动之前,程序首先会检测电池的电压。
如果电池电压过低或过高,程序会发出报警。
②程序通过一个定时器中断检测控制脉冲信号的
输入情况。如果在一定时间内没有信号输入,程序将
关闭电机以防发生意外情况。
· 2 3 · 《测控技术》2006年第25卷第7期
③程序在每次换相结束后,都会检测电池的当前
电压与电机的工作电流。当电机发生堵转时,通过电
机的电流会陡然上升,软件将立即关闭电流输出以防
止电池或电机的损坏。
④程序启动MEGA8中的看门狗功能,用以外部
干扰导致软件发生异常时自动启动。
3 电机测试
作者对无传感器无刷直流电机控制系统进行了两
项测试。一项为线性度测试,另一项为电机驱动测试。
线性度测试使用了某航模公司提供的电调专用测
试仪。测试仪可产生从1 100~1 900μs的连续信号,
并能自动记录下电机的转速变化曲线。控制系统测试
结果如图8所示。图中, 1 100~1 200μs阶段为电机
的外同步启动阶段。1 200~1 800 μs反电势过零法
调速控制阶段。1 800μs以后为电机全速运转阶段。
测试结果显示作者设计的控制系统在调速控制阶段具
有较好的线性度,并且在从外同步启动阶段向反电势
过零法控制阶段过渡时也较平滑。

图8 电机控制系统测试结果
电机驱动测试的目的是要考验控制系统与无传感
器无刷直流电机兼容性。测试选用了市售的4 款电
机,即ELE850: 7. 3 雷达减速器+ 9047 桨, GS2030:
7. 14减速器+ 9047桨, ELE1000: 9减速器+ 9047桨,
TOWERPRO:外转子无刷+ 9047桨直驱。测试时使用
7. 4 V 2 500 mah 锂电池作为控制板的驱动。使用
4VF发射机/接收机提供电机速度控制脉冲。测试时
人工操作4VF发射机发出1至22级速度控制信号,
在每一级信号下测量电机的实际转速。测试结果如图
9所示。测试结果表明,控制系统对4款电机均能良
好地驱动。
4 结束语
针对航模无传感器无刷直流电机控制系统的特点
要求,采用MEGA8单片机设计的电机控制系统,使用
硬件和软件相结合的设计方法,使用硬件电路搭建必
要的外围电路,主要使用软件来实现电机调速控制,使
系统在满足航模电机调速要求的情况下,具有更好的
灵活性。
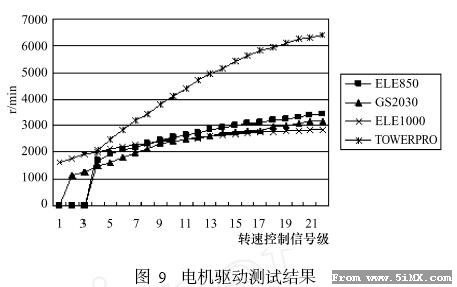
图9 电机驱动测试结果
作者: 3d-boy 时间: 2006-12-25 11:25
:em26: 頂
作者: 正在充电 时间: 2006-12-25 15:37
好资料!收藏!
作者: cwq 时间: 2006-12-25 17:08
:em24: :em24: :em24:
作者: moxingchuan 时间: 2006-12-26 09:31
:em24: :em24: :em24: :em24: :em24: :em24: :em15: :loveliness:
作者: 123yj 时间: 2007-1-2 22:01
标题: good
作者: leom 时间: 2007-1-3 01:58
:em00:
作者: masm32 时间: 2007-1-3 06:30
:em24: :em26:
作者: 精微 时间: 2007-1-3 08:57
谢谢!!!:em24: :em24: :em24:
作者: lxw2087290 时间: 2007-1-3 12:14
:em24: :em26: :em26: :em26:
作者: kyosh 时间: 2007-1-4 12:30
顶上。为了光荣牺牲的楼主
作者: Jaken 时间: 2007-1-4 13:37
收藏:em24: :em24:
作者: 易拉罐 时间: 2007-1-6 09:57
:em24: :em24: :em24: :em24: :em24: :em24: :em24: :em24: :em24: :em24: :em24: :em24: :em26: :em26: :em26: :em26: :em26: :em26: :em26: :em26: :em26:
作者: kyosh 时间: 2007-1-22 11:29
求完整线路图
作者: madcat520 时间: 2007-1-22 12:35
收藏ing 慢慢研究 哈
作者: GoodPilot 时间: 2007-1-22 14:41
:em26:
作者: 狼来了 时间: 2007-1-26 20:58
:em26:
作者: simber 时间: 2007-1-26 21:19
UP...UP
作者: cwq 时间: 2007-1-27 09:38
:em24: :em24:
作者: wwk1996 时间: 2007-1-29 16:39
好,《测控技术》2006年第25卷第7期。
作者: dongrui 时间: 2007-3-12 04:17
good原帖由 123yj 于 2007-1-2 22:01 发表
作者: heshang640 时间: 2007-3-16 11:03
标题: 航模直流无刷无感电机调速控制系统设计--原文
我有航模直流无刷无感电机调速控制系统设计 原文
作者: cbr7650 时间: 2007-3-16 13:59
dddddddddddd!
作者: 鹤山 时间: 2007-3-16 22:28
好资料!收藏!谢谢啦。
作者: masm32 时间: 2007-3-17 06:52
确实是好东东~:em26:
作者: user222 时间: 2007-3-19 19:15
支持~~~~~~~~~~~~~~~:em03: :em03:
作者: wenhong0419 时间: 2007-3-19 22:54
:em09: 鄙视一个人
作者: nnn_ooo_111 时间: 2007-3-20 10:03
谁???????:em22: :em22:
作者: louckycamel 时间: 2007-3-20 12:46
标题: 谢谢!!!
谢谢完整线路图
作者: darlin 时间: 2007-4-23 21:44
标题: 这个东西不得不顶了~~
我也顶!
作者: simber 时间: 2007-4-23 22:32
dddd顶起来~~
哪位大哥能不能把完整线路图发给我?先谢谢了
作者: 鹤山 时间: 2007-4-23 23:27
:em26:
作者: mafei_2005 时间: 2007-7-11 16:35
好东西,有完整电路图就更好了!
| 欢迎光临 5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年) (http://5imx.com/) |
Powered by Discuz! X3.3 |