|
我刚才在房间飞,也发现了轻微自旋了,大概2分钟能逆时针旋转10度左右,一节电池飞下来大概快旋转了90度了,第二次起飞又能自己修正,纳闷呢,只是悬停,油门轻微的推的,没有动方向 |
欢迎继续阅读楼主其他信息
|
如果大家刷成最新固件14.10用其中现成的QAV250模板能省不少劲,那个参数已经调得很好了,我飞前又重新校准一下水平就很稳了。 |
flyer7513 发表于 2014-12-13 19:59 很慢的旋转,大家都说好像有,只要不是特快的那种,这飞控都没地磁和gps |
 来自苹果客户端
来自苹果客户端
miketom0037 发表于 2014-12-13 15:49 没解决,地面待机状态还是自旋,但是在控制飞行状态好像还可以,不太严重 |
|
楼主解决了么,我的也有这问题 |
|
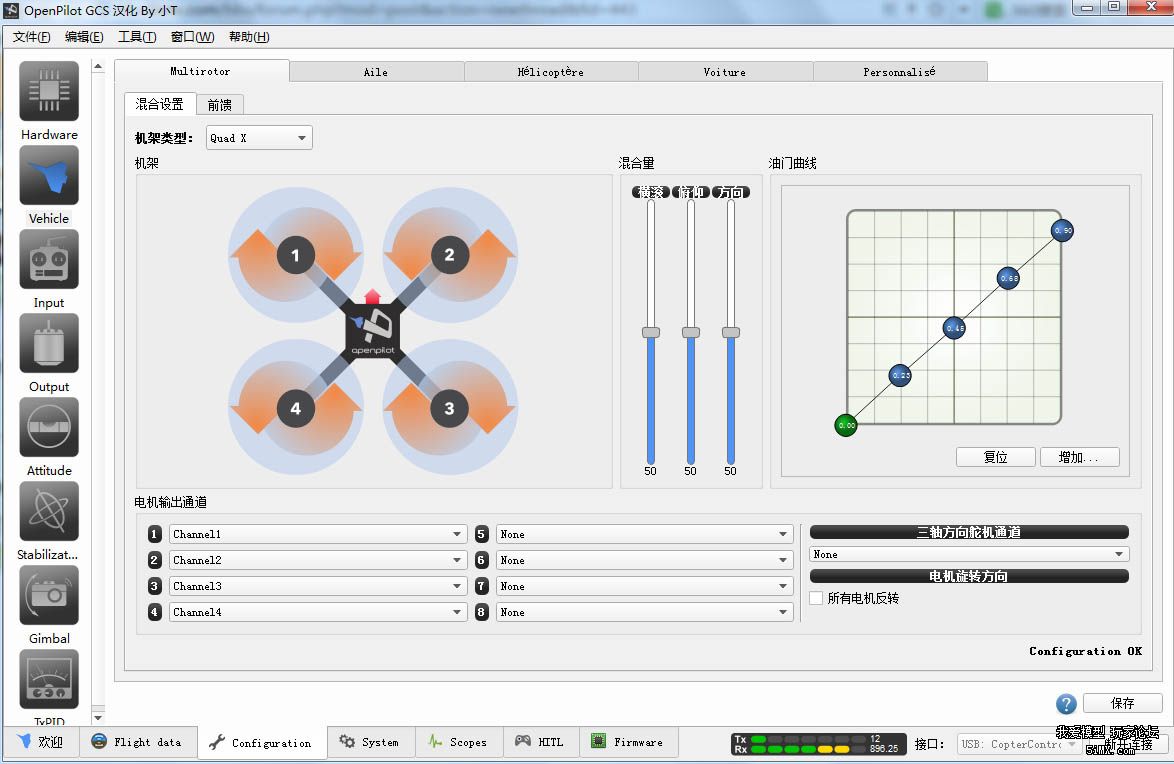
PID设置或者所谓的感度要在”stablization“里面调整,第一张图里面是调整输出油门混控的。 |
flyer7513 发表于 2014-12-2 09:30  |
zhanyiduo 发表于 2014-12-2 07:50 好专业的回答,我得先补习下微积分啊 |
|
cc3d的朝向是通过陀螺仪积分算出来的,随着时间积累误差会累积越来越大。其实这个误差对于另外两个轴(俯仰和横滚)也有,只不过因为有引力的存在可以修正。但是z轴由于没有地磁计则无法修正其积累的误差。 |
|
cc3d没有地磁传感器,自旋正常,大都用来飞穿越的,也用不上地磁。 |
|
CC3D博大精深,同问、。。。 |
 /1
/1 
 收藏
收藏
