|
新年好! 罗盘抗干扰的想法不错,期待下效果~~  |
|
似乎很不错啊 |
|
价格? |
Fdzy 发表于 2015-2-18 14:48 对的,这个方法的前提就是多轴不会起飞后就一直悬停,在一定速度飞行的时候GPS航向信息会很准确,可以用来修正陀螺仪的误差。 |
task00 发表于 2015-2-18 14:27 用不着抄板的,直接看代码就可以了。 |
|
陀螺积分和gps惯导来解析姿态么?悬停时候似乎会有漂移。试过。 |
dawanpi 发表于 2015-2-18 14:15 好想法! |
task00 发表于 2015-2-18 11:36 虽然AQ的固件开源,但是Quatos库不开源,所以最多只能下载个固件放到IDA里面看看,源码拿不到的,和飞控一起来的还有Quatos的授权码,和F405的序列号关联的。 |
zhanyiduo 发表于 2015-2-18 12:03 感觉多轴短时间飞行还是靠谱的,不过需要好的减震/滤波器,GPS精度也要高。等试试就知道了。 |
task00 发表于 2015-2-18 11:36 大疆也有这个?AQ升级的授权费用999美元一个呢,那WKM和A2岂不是太便宜啦? |
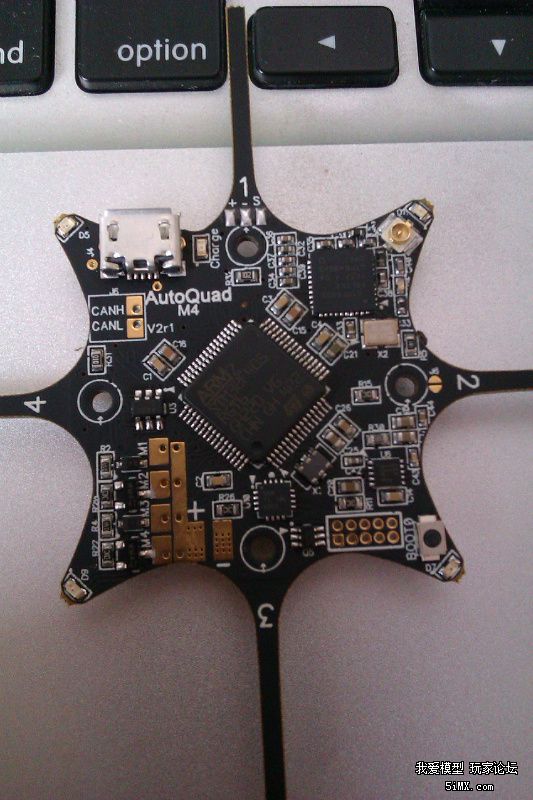
shanshuimoxing 发表于 2015-2-18 11:42 装空心杯电机做小四轴玩的。 |
|
想知道陀螺仪积分用gps修正的方法靠不靠谱 |
|
|
|
那几根辫子是干什么用的? |
|
打开传说中的自适应算法模块看看效果,求试验结果。。。 我估计这个功能是dji在fpga里实现了的。 |
 /1
/1 
 收藏
收藏

