停不住 发表于 2015-6-26 21:48 1.最上面的那个是不是可以理解为为了悬停,机器自身调节的力度?飞行过程中的调整通过下面的pid实现?那么飞机在飞行中突然转化成悬停这个又跟哪里有关系? 2.最上面的默认45度/s,那么lz的10.+是不是100度+/s进行调整?根据这个我做了个试验,仅仅只是调整到9飞机基本停不下来的抖,是不是就是你说的90度/s进行调整? 3.下面的pid中应该是就飞行过程中稳定度?貌似在推杆过程中稳定度除了掉高外没有其他的好考虑啊 大神,你说的我做了试验,但是目前我的问题在于运动转变为悬停的过程非常不柔和。另外就是掉高,能否通过pid的方式进行调整? 还想让大神具体解释下I和D的作用 |
欢迎继续阅读楼主其他信息
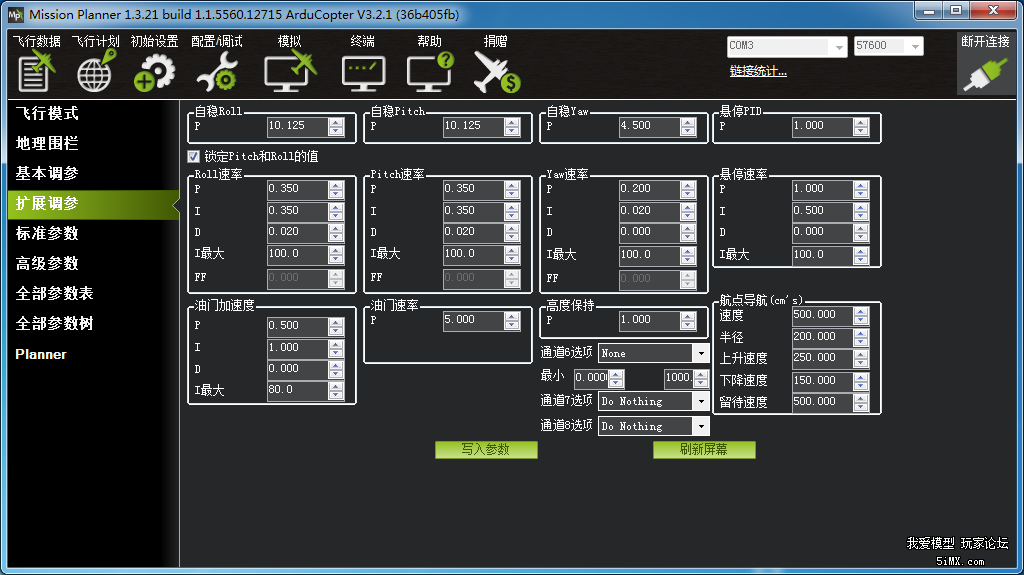
停不住 发表于 2015-6-26 21:48 比喻很贴切! |
|
今天调了一天,主要调上面。个人认为上面主要是调整机的全局性的东西,下面比较细节化的东西 |
SageST 发表于 2015-6-26 23:37 我们说的就是上面的p和下面p的差别 |
|
个人理解:上面的是自稳的pid,也就是输入量是角度对应的pid。下面的是任何模式的pid,也就是输入角速度的pid。 |
|
其实我不知道有什么区别 看楼主的 PID 应该是自动调参调出来的吧 自动调参动的 多是 自稳 P 我喜欢 手动调 下面的 PID 应该都能调到相当的效果 估计是程序源码里面 有两处 PID 能影响到稳定效果 调不同的地方 都能达到相应的水平 |
|
楼上 两位 答非所问啊 楼主说的是 自稳 P 和 下面 roll pitch yaw PID 的区别吧 |
大校讲的很到位。比喻也很恰当。 我再简化一下。自稳p = 遥控器舵量的反应。调高反应大。调小反应小 Rate P = 自稳修正的力度。遥控器快速打舵再回中。飞机也会快速倾斜再回中。回中后抖动就是高了。回中慢就是小了。我的是0.18 Rate I = 修正延时。我一般设成和Rate P 一样大小 Rate D = 0.015 想调稳的话。在这个基础上加Rate P/I 就可以了。我这个参数飞450轴距也很好飞。飞960轴距也能用。 |
|
论坛很多说明啊! P就是比例,简单想成出力好了! 自稳的P是角速度,4.5就是45度/秒。这个数值太小反应会缓慢(适合航拍),大了会很激烈(暴力)。 Rate P 是很关键的参数,就是用多大的力响应姿态修正,太小会软弱无力,大了有时会让姿态过头(想成拔萝卜好了,过头会摔跤的)。 3.1.4以后,APM,pix的默认值很适合大部分机型,如果能自稳升空,做下自动调参就很好飞了。 |
 /1
/1 
 收藏
收藏