|
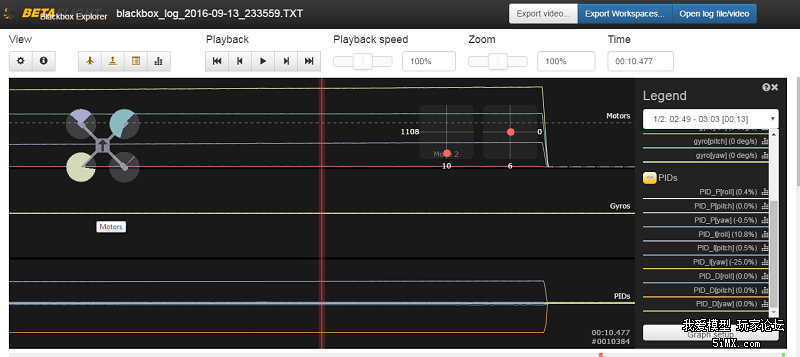
在没有上桨的情况下 blackbox记录的日志是没有意义的 只要是陀螺仪相对于校准的平面有一丝偏差 飞控就会通过增加或减少某几个电机的转速来达到所谓的水平 如果没有猜错 你这个日志是在angle或者horizon模式下记录的吧 因为没有桨 所以电机增加转速起不到任何作用 但是飞控会认为是电机转速还不够 所以就会一直加速 以至于最终电机转速差距很大 看图来说 你的飞机应该是往左前方倾斜了 所以飞控想把飞机修水平的话需要4电机加力 1电机减力 最终导致如图所示的情况。 |
|
用apm飞控啊,你用的那个飞控一直存在这个问题 |
|
F3会自动调节每个马达的转速,有高有底,所以你监测每个马达的转速数据是不一样的,正常现象,不必大惊小怪 |
|
你这么一说好像我的也有这个问题,继续关注 |
 /2
/2 
 收藏
收藏


