bg7msa 发表于 2018-10-26 16:10 你可以都试一下,如果飞机都比较稳的话,尽量选低频率的,这样CPU占用率低,有利于工作稳定 |
bg7msa 发表于 2018-10-26 16:10 F3开到4K 2K最合理,频率和CPU占用率比较适中、均衡,系统运行也比较稳定。 |
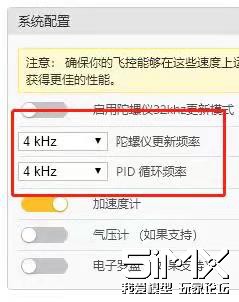
| F4飞控PID循环频率只能开4K是怎么回事。 |
|
F3飞控 双4K就够了 F4 F7 MPU6000 双8K就够了 ICM20602 ICM20689之类的可以开更高 但个人感觉意义不大 |
| 频率越高,姿态校正的越快,飞机显得更稳,不过这些数据的计算有复杂的PID算法需要一定的时间,电机调整速度也需要一定时间,频率太高的会造成算不过来,下一次更新的数据又来了又要计算。所以频率合适就行,不必追求太高。我自己做平衡车,每5ms获得一次陀螺仪数据,再PID计算,再调整电机功率,也就是200Hz的频率,已经足够了。 |
 /1
/1 
 收藏
收藏

