飞天少校 发表于 2019-3-7 11:26 对不起,恕我冒昧了。转速差为什么要在机械结构上实现?如果在结构上实现了转速不一致的情况,那么,上下桨叶迎角也就得跟着变了。这样做不是不可以哈,从原理上来说,就把这个问题复杂化了。真实的共轴直升机是怎么样,我也不是很清楚哈。 |
| 个人理解,不一定正确啊。螺旋桨旋转后,机体本身会产生反扭矩,这个反扭矩在真空中也是存在的,在咱们实际环境中,还需要考虑空气粘稠问题,或者说空气阻力,所以,共轴直升机的航向问题,实际上就是反扭矩和空气阻力的叠加。正常飞行,或者悬停的时候,转速一定是一致的,但是方向相反,这就保证了反扭矩相互平衡,不会产生航向问题;另外,桨距也应该大致相等,这样空气对飞机的作用力也是平衡的,因此,在这种情况下,航向保持一致,或者均速转动。当转速或者桨距不平衡的时候,或者说反扭矩或空气阻力不一样的时候,就会产生航向运动了。 |
|
所以这个图还不完整啊 |
狐狸 发表于 2019-2-26 00:38 顶顶顶,说的好。这个应该是全差动转向。 |
|
本帖最后由 狐狸 于 2019-2-26 00:55 编辑 咱们玩的模型共轴直升机因为机体重量很小导致其转动惯量很小,上下大桨的总距差导致的扭矩差就可以使机体快速转向;但在真直升机上因机体重量很大,上下大桨的总距差导致的扭矩还不足以使机体快速转向,所以要加上上下大桨的转速差变速轮系以增大上下大桨的扭矩差来快速转向,比如卡式系列直升机; 拉玛系列共轴小电直,采用双主电机驱动,主控电路板的混控(油门与方向舵)就起到了同样的作用。 如果采用上图同样的齿轮系传动,模型共轴直升机的方向舵信号通过锁尾陀螺仪再去驱动双向电调电机,也可以实现转速差来转向,主驱动电机就只要一个了,这样可以简化上下大奖的变距连杆系;不过齿轮系就稍微复杂一些了。 |
本帖最后由 狐狸 于 2019-2-26 00:59 编辑 
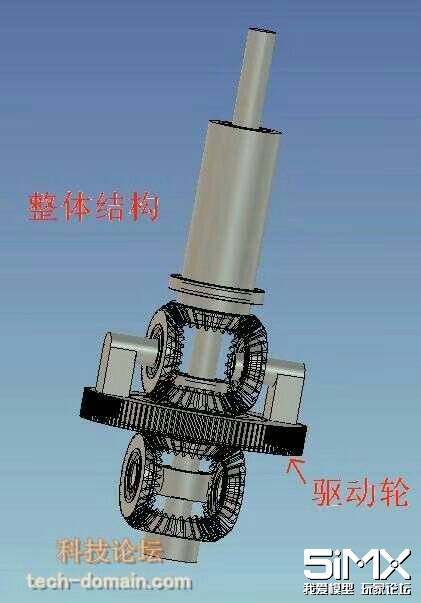
兄弟,看懂这张图轮系图,你就知道共轴直升机的主动变转速差的传动结构了; 发动机驱动主驱动轴单方向旋转,变转速轴由电机带动双向旋转; 如果所有锥形齿轮均为等齿数的45°啮合: 内轴转速Ni=主驱动轴转速*变速比Kz+变转速轴转速*变速比Kb 外轴转速No=主驱动轴转速*变速比Kz-变转速轴转速*变速比Kb 内外轴转速差Nx=变转速轴转速*变速比Kb*2 在机械专业中这些轴系的转速和、差乃至乘、除、比例是最基本的齿轮系传动设计哈 一般的机械技校、机械中专、专科或本科的机床传动原理课本上都有的;   |
|
下面那两个水平横向的圆锥齿轮外再套一个水平轴向的大齿轮(结构与差速器一样),这个大齿轮的正反装就可以改变两个主旋翼的转速; |
飞天少校 发表于 2019-2-25 15:43 我的意思是你发的这张图的飞机可能并不是转速差来控制转向 |
飞天少校 发表于 2019-2-25 09:25 所以说不定是转速相同的类型呢? |
|
为什么一定要产生差速?请先解释。 |
 /2
/2 
 收藏
收藏


