| 用的是PX4,还是ardupilot呢? |
不错!不错!  |
为毕设而来 发表于 2020-10-6 21:06 哈哈哈哈,我也想要,弄个教程就好了 |

尝试减小力臂。 |
|
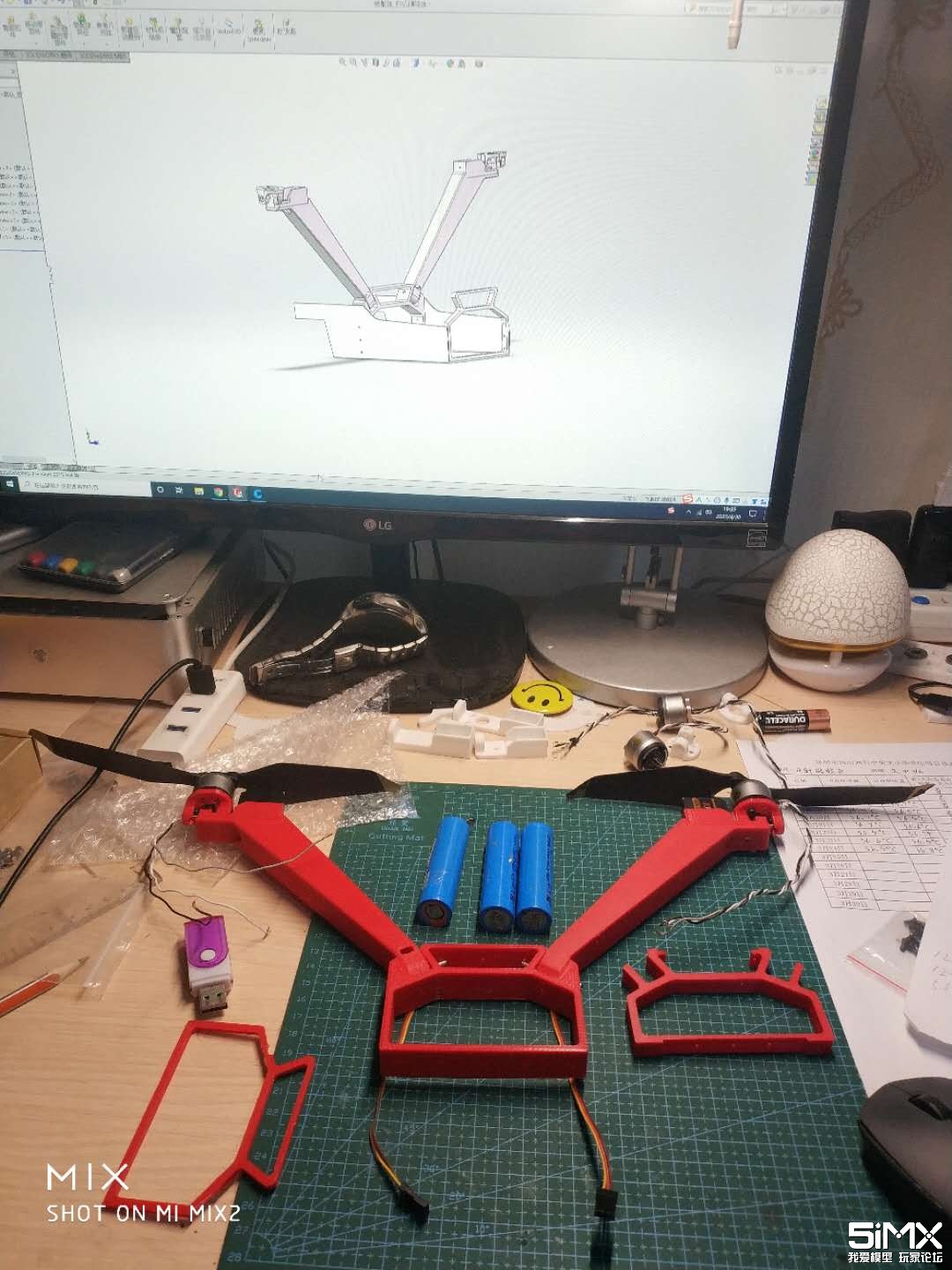
建议尝试优化一下电机座,减少所需要的扭矩。换用更大的舵机,速度可以更快,例如: 0.06s/60度;扭矩也可以大一些。 优化的目的,是为了 Pitch Rate P 可以给一个更大的值,而不至于发生震荡。 这么小的阿凡达,而且是低重心的。目测是可以调出与普通4轴相似的手感,简单的说就是打升降舵的时候,Pitch 的姿态是受控并且与摇杆对应的,不会有多余的“荡起来”的现象。 |
| 楼主可以造一个纵向双旋翼出来了 感觉比横向双旋翼稳 |
|
太厉害了,楼主可以出一期pix飞控飞两轴固件方面的教学吗 |
| 这种布局稳定性比四周差是正常的,但是不晓得原版的稳定性问题有没有解决。感觉楼主这个飘的还是挺明显的,后期可以通过飞控调整过来吗? |
yangyh75 发表于 2020-6-3 12:46 不错 不错 |
|
本帖最后由 yangyh75 于 2020-6-3 12:47 编辑 今天测试了一下GPS悬停,可以稳住,四周飘,比起四轴稳定性难以驾驭。 https://v.youku.com/v_show/id_XNDY5NzEwODUyMA==.html |
| 不知道稳定性怎么样? |
|
续航应该差不了,没有测试。稳定性比不上四轴。 |
| 续航怎么样 |
yyqop01 发表于 2020-4-30 20:30 机臂的加固可以试下夹碳板 |
 /1
/1 
 收藏
收藏
