本帖最后由 qing83783100 于 2022-5-19 15:29 编辑 Cocolsj 发表于 2022-5-19 06:47 我一般都是55的螺距飞,比较好控制,用1.2mm轴径的8520电机,2分钟暴力一点下来也不会太热,可以接受,不过飞机其它地方改动比较大,可以看一下我另外一个贴,短尾巴100,原装机子不改装的话就不要指望3D什么的了,飞一下航线还是可以的 |
 来自安卓客户端
来自安卓客户端|
本帖最后由 qing83783100 于 2021-9-5 15:08 编辑 这个问题我就不知道了,我一直都用3G模式来飞,用的是改了固件的D7E遥控器,X6控我也有,但没有用过,改天可以试一下,6050模块不需要连电脑的,主板上电的时候会初始模块,看你3G能正常飞的话,应该是已经替换成功了,至于不能设定重置的问题,可以再看一下说明书,是不是还有什么没有搞好,我记得舵量要100%才可以重置。 |
来自安卓客户端|
楼主您好,1.请问一下换装中置6050模组后原厂X6遥控器还需要再重新设定吗?(摇杆向下外八字调试,及6G调试两个遥杆都向下) 2.我现在有个问题就是6G调试(两遥杆向下3秒后,以前会闪灯代表进入6G归零调整模式,现在两个摇杆下拉等待好久都不闪灯了,好像进不6G调整模式了,因为灯不闪一直长亮) 不知您是否也有此问题? 3.是不是这个外置6050模块需要用电脑编程或设定后才能使用呢?(市售的6050通用模块需要自己编程或归零调试吗?) 以上麻烦楼主或大神们指导或赐教,感谢大家 |
|
因为不知道如何上传照片,所以只能以文字叙述 |
| file:///C:/Users/Administrator/Desktop/AAB.jpg |
|
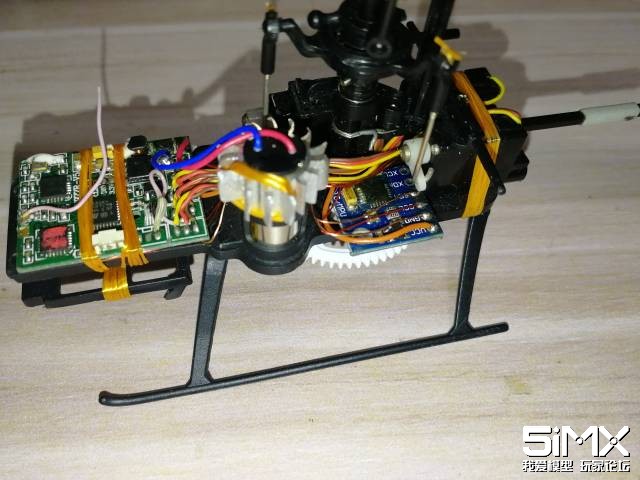
感谢楼主的建议,我用最笨的方法(把原来的6050芯片解焊拿下来),然后把23,24号脚信号飞线过去中置6050板子接SCL,SDA,再引主板的3.3V和GND过去接VCC和GND,现在改造好也试飞几次,确实是比原来板载6050更稳定些更灵敏些,但是发现有下列几个小缺点 1. 6G自稳好像没有了,感觉好像只能用3D模式飞(切换6G自稳拨杆,好像不起作用). 2.不知道是不是改了中置6050模组,一开始陀螺仪修正方向是错的(正确的应该是飞机前倾时,十字盘要向后修正.它却修反了,所以我改遥控器第5 通道为反向,修正方向才正确). 3.或许是我用3M的硬质泡棉粘中置板子,所以机子特别敏感,摇杆打一点点反应就很快,所以又降低D/R值和EXP值(改为负值让舵量反应变慢些) |
jerry0465 发表于 2021-9-3 22:14 但是第9脚能否从地断开,接到3.3V,要看主板的布线如何,才知道能不能这样子操作,改天有空我把原芯片吹下来才看到的。我是直接断开原6050的I2C总线,再接上新模块的,这样子是可以飞的 |
来自安卓客户端|
本帖最后由 qing83783100 于 2021-9-4 13:35 编辑 不好意思,是我写错了,原来的6050芯片的9脚是接地的,把它通过限流电阻接到3.3V,新的6050芯片9脚接地,I2C总线直接并起来,我把110的电路和955的混了,这样比较简单,原来的主板只动了6050的第9脚,然后飞4条线到新主板上就可以了 |
来自安卓客户端|
感谢楼主教导,但还是有些不明白 1.我用"万用表蜂鸣檔"量测原本板载6050芯片9号脚(地址脚)已经是跟GND导通接地的. 2.原本6050已经是接地状态(我什么都没做,)是否只需要把原本6050芯片的23,24号脚飞线过去新6050模块的SCL,SDA接点,9号脚接3.3V就可以了吗? 3.或是用最原始的方法干脆直接解焊拿掉原来的6050然后飞线过去再加正负电源呢? 4.因为不是电子科学生所以难理解第2项做法(原本6050没有拿掉而9号脚本来就接地了若是开机了电也是会导通的,会不会变成2个6050模组都工作呢?) 以上请楼主指导一下.感谢您 |
|
楼主您好:请问一下如何把CPU和板载MPU6050陀螺仪的I2C总线断开?是把板载6050整个解焊拿掉吗? 另外请问一下要从哪里接线到新的中置6050板子上呢? 有没有照片可以上传一下,感谢您 |
张开翅膀 发表于 2021-3-29 23:16 那应该是外置的舵罗仪有问题,或者接线或者芯片出问题了,换一个试试,理论上外接模块是完全可以替换内置的,只有模块正常,接线正确 |
来自安卓客户端 /2
/2 
 收藏
收藏




