|
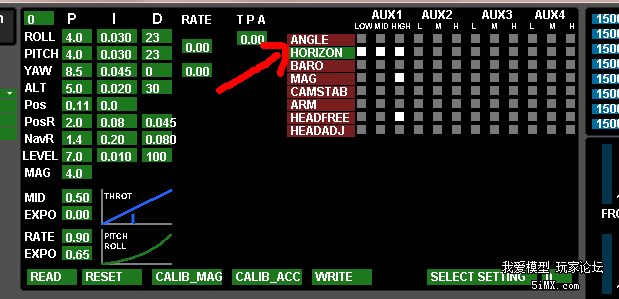
本帖最后由 szhcs 于 2014-3-31 14:23 编辑 34楼正解,前面都有误解。 HORIZON:摇杆位于中心时为ANGLE,摇杆打到底时ACRO模式。所以它是ANGLE和ACRO的混合模式。 我用HORIZON模式飞过横滚,wiki是正确的。 只要摇杆回中时,不管飞行器倾斜角度是否大于45°时,飞机就会自动恢复水平(自稳)。 |
|
本帖最后由 dukong 于 2014-3-31 08:39 编辑 还是看官网wiki的权威解释吧:http://www.multiwii.com/wiki/index.php?title=Flightmodes 没法直接贴内容出来,只能放链接了。 |
|
非常感谢11楼 ~ |
|
谢谢11楼的兄弟。 |
|
想到继电器的常开触点了。。。 |
|
angle:应该常开,自稳模式,摇杆回中后自动保持水平,是什么时候都以水平姿态为基准的。 horizon:介于全手动与自稳之间,摇杆回中时保持当前状态实时更新姿态初始位置 好像说选择horizon模式后,飞机倾斜角度小于45°的时候,摇杆回中时,飞机就会自动恢复水平(自稳 )。 飞机倾斜角度大于45°时,就会变到手动模式,摇杆回中时,飞机不会恢复水平。 BARO:气压定高 MAG:地磁方向锁定,即不动摇杆时方向保持,不会被外部风力影响 CAMSTAB:云台控制 ARM:解锁 HEADFREE:无头模式,例如在解锁前,方向与控一致时,解锁后,无论如何自旋,控的方向与解锁前一致 HEADADJ:重新指定无头模式的方向,需看清当前的头尾方向,按当前方向确定无头模式 |
ptlin 发表于 2013-4-8 10:46 已经发现了 谢谢 |
luoxin1984 发表于 2013-4-2 15:59 在config.h中开启GPS选项才会显示 |
|
这贴学习了,看懂了各选项的作用. 谢谢 |
|
本帖最后由 ptlin 于 2013-4-2 18:03 编辑 11楼有误,17楼是对的; 另 MAG,HEADFREE,HEADADJ三者与方向(YAW)相关 MAG:地磁方向锁定,不动摇杆时保持方向 HEADFREE:无头模式,在解锁或关闭HEADADJ时,机头方向就是控的前方 HEADADJ:开启时重新指定无头模式的方向,以关闭HEADADJ瞬间的机头方向,为控的前方 |
|
2。2的gpshold 和GPS home都跑哪去了 |
|
是的,感觉不多人玩嘛。 |
|
这贴不错,学习了。mwc相关的讨论太少了 |
|
本帖最后由 giantwjt 于 2013-3-31 23:29 编辑 这贴不错,学习了 |
|
本帖最后由 giantwjt 于 2013-3-31 23:28 编辑 这贴不错。谢谢 |
long0001 发表于 2013-3-31 08:15 我看英语原文,也觉得是这个意思。 |
abccbef 发表于 2013-3-30 13:39 谢谢翻译,正在找呢!!!  |
|
顶啊顶,要顶,尤其是英语差的 |
 /2
/2 
 收藏
收藏

