scaple 发表于 2013-10-9 17:03 谢谢回帖,,有模友认为遥控接收失控保护时候的油门 就是返航时候的油门,,不用调PID,,,是不是这样 |
欢迎继续阅读楼主其他信息
|
好帖,顶一个 |
scaple 发表于 2013-10-9 16:27 这是航点、航线飞机高度。 |
空军8号 发表于 2013-10-9 13:57 更新太频繁 大家都喜新厌旧 |
caosix2 发表于 2013-10-9 17:04 http://copter.ardupilot.com/wiki/arducopter-parameters/ 呵呵 少打了一个零20000啊,不过20米也没问题,我就飞过这个回家高度,便于仔细观察飞机姿态 |
生活如此多娇 发表于 2013-10-9 15:51 修正一下:应该是 20米 。2000cm 。 你的 连接 很好用 ——谢谢——是固定翼的。 ArduCopter Parameters List 直升机 的 ??怎么 找 ?参数表解说 |
|
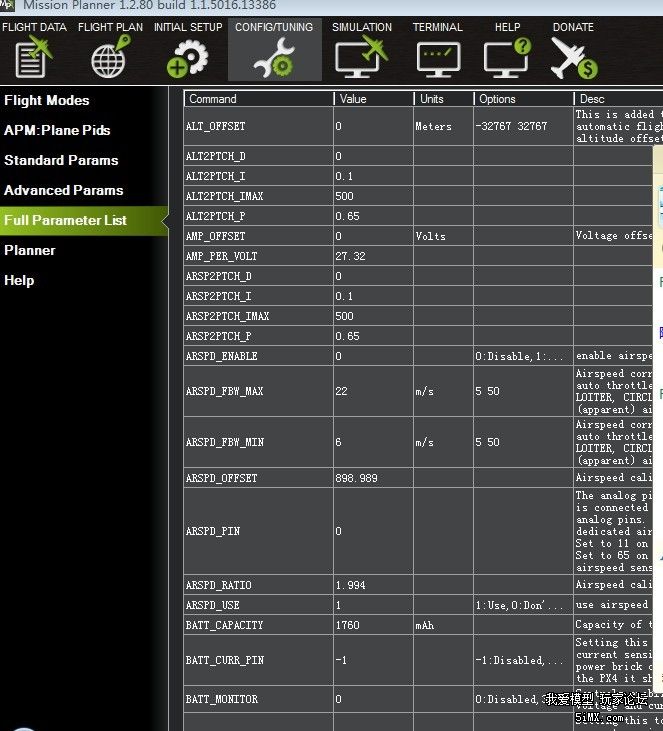
巡航油门是 TRIM_THROTTLE,这个是所有自主模式的油门控制百分比,如果我没记错的话。 巡航速度是 ARSPD_FBW_MIN 和 ARSPD_FBW_MAX,但这两个参数需要和空速传感器配合使用,比较麻烦。我还没用过。 |
scaple 发表于 2013-10-9 16:33 自动返航的速度,飞航点的速度怎么设置的 |
scaple 发表于 2013-10-9 16:33 CM 谢谢哈  |
521520 发表于 2013-10-9 16:24 单位是 cm 
|
|
难道偶的不是最新版?今天才升的级哈
|
wangzhenxiong 发表于 2013-10-9 16:18 这个 很重要 啊 确定是20米? |
生活如此多娇 发表于 2013-10-9 15:51 ALT_HOLD_RTL是正解,但是2000是20米不是200米,可别把楼主害了哈哈哈。。。 |
|
本帖最后由 生活如此多娇 于 2013-10-9 15:53 编辑 新版的地面站取消了保持默认高度的勾勾,你需要自己到高级参数里修改 ALT_HOLD_RTL 这个参数 ,改成-1就是用当前高度回家,改成2000就是200米回家高度。 这里有APM所有参数的详细说明http://plane.ardupilot.com/wiki/arduplane-parameters/ |
|
有中文的撒,只不过翻译得不是很全面
|
|
会玩得都看懂了,没人去翻译了。 |
|
都愿意做伸手党。。。。没人愿意付出,可不就。。。 |
|
难道这么多人在用APM竟然没有一个人将它进行汉化吗?开源的东西后期也可以进行改进的啊!~ |
|
有的。RTF-什么什么的 |
 /2
/2 
 收藏
收藏

