|
|
我開了這一個新的標題, 希望大家都可討論討論~:em00:
在非鎖頭模式下, 調整尾巴中立點, 我是絕對的認同~
因為servo 在不動的時候, 是會回中位的 (正如我們駕駛時, 一直都想把方向盤回中就能走直線)
此時如果尾巴中立點正確, 的確 gyro 是不用修正~
駕駛者除了可以自行切線外(rudder 打舵), 還做了gyro 的角色(保持車子在同一行車線上走)
但在鎖頭模式下, 尾servo 是不會回中位的
你可想像車輛開了自動導航一樣, 行直線,轉彎, 保持車子在同一行車線上走, 都由它負責
只是它不會自己切線的 (正如直昇機的尾巴鎖得很好,不會走尾),
只有當駕駛者手動方向盤, 車子才可切線( 正如我們打rudder 舵一樣)
當切線動作完成後, 沒錯, 我們rudder 杆是回中位了, (正如方向盤回中了)
但自動導航的車子, 可能現在還在轉彎, 所以, 車輪狀態不是回中位的
(正如我說, 鎖頭模式下, 尾servo 是不會回中位的)
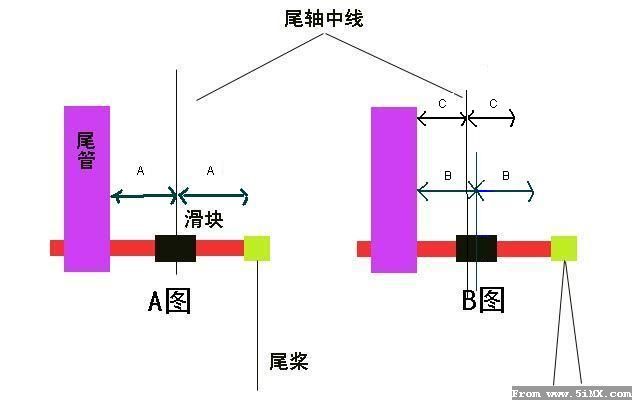
我想說, 有些人設了中立點以後, 在鎖頭模式下發現左右自旋速度不一樣
是因為你們沒有把左右行程設置相同
就像車子的方向盤是正的,但車輪是偏了一點點, 然後再讓自動導航幫你駕駛
試想像, 駕駛者想切線的時侯, 就會出現有一邊轉多,另一邊轉少了的情況吧~
在非鎖頭模式下, 推rudder, 不論怎麼樣, 當放手時它都會回到中立點
(當然如果不回中就可怕了,飛下來, 那怕不會自轉再炒機)
那在鎖頭模式下,而且設好了中位, 現在我一接電,servo 到中位停止,我只要推一下rudder, servo 就動了, 然後停在某地方
它不再回中位了,你們還說它有中位嗎? 此時再起飛, 難道飛機會不停地自轉, 然後gyro 不停地工作嗎??
如果是真的話, 請你們在起飛之前,不要動rudder, 還不要移動機體啊, 否則中位變了, 以致增加gyro 工作量 (呵呵~)
我想總結一下, 用401 在鎖頭模式 時:
設置中立點與否, 是不會對其鎖尾能力有大的直接影響 , 因為已經交給gyro 工作了
已經設了所謂"中立點"的, 會使左右兩邊的"機械行程不一樣" , 造成自轉速度左右不同
有些人的解決方法是 更改 rudder ATV , 以取得差不多的手感
沒設置中立點的, 當然沒有自轉速度左右不同的問題啦, 但是還需要設置servo 的總行程
這樣你們的尾巴才會發揮得淋漓盡致~
我再用一例子去證明鎖定模式時, gyro 是不會理什麼是中立點 :
在鎖定模式下工作, 插上電, 在地上把機身轉一下
當你停下來,你可以看到servo 都會停的
為什麼呢 ? 就是因為一開始起飛時, 機子自本的反扭力, 把機身自轉,
而這時候, gyro 感應到之後會通知servo活動,直到反扭力已抵消
一但反扭力已抵消,gyro 不再感應到自轉, 所以servo 就停下來
這個還證明了一點, 就是不調中立點, 是否gyro ,servo 都會工作多了??
答案肯定是不會!!!
***請你們不要再把 "非鎖定模式這一套" 應用到鎖定模式上*** |
欢迎继续阅读楼主其他信息
|



 /1
/1 



 发表于 2008-1-14 10:10
发表于 2008-1-14 10:10

 收藏
收藏 楼主
楼主