1. rate模式里调整. 使用默认PIDs和默认looptime.起飞悬停看看你的多轴是如何反应的. 如果不稳的话,那么需要调整PID. 将looptime降低到3000,然后在试一。一点点的降低知道你觉得比较稳.然后细调你的PID.
2. 我不使用增加P到某一个值然后发现它开始震荡,然后在降低一点P值。我的方法是一点点的增加P值知道达到比较好的效果,这样可以减少调整的次数和错误
P: 当你移动你的摇杆到左或者是右然后回到中立位置的时候,它应该立刻停止而不应该是那种很生硬又或者是很粘滞,一直调整到它有轻微的震荡,一丝丝的震荡就好.
这时降低P值.如果你发现它变得太迟钝了那么增加P值,对于pitch和yaw的调整同样如此. 对于yaw而言,有些不同. 观察它停下的状态,如果很生硬的话,它可能会影响到pitch和roll,有时候甚至会影响高度锁定. 如果你发现这样的情况那么请减小P值.
I: 当你推油飞行并且推杆使得多轴的前进角度为35-45度时不应该掉高.并且应该保持当前的角度.如果没有保持的话那就增加I值.对于roll的I调整同样如此.
当你在快速飞行时如果I值过高的话,会出现抖动(不是高频振动,是低频振动).对于yaw而言也有些许不同- 打方向杆使得你的多轴航向偏移一个角度,然后摇杆回中,你的多轴应该保持在那个航向,如果你发现航向漂移的话那么增加I值直到不漂移.
D: 用于克制P值(pitch、roll)过大导致的过于生硬的停止, 增加D值,过高的D值会导致多轴操作起来过于粘滞.
|



 /1
/1 



 发表于 2015-4-6 10:36
发表于 2015-4-6 10:36

 收藏
收藏 楼主
楼主
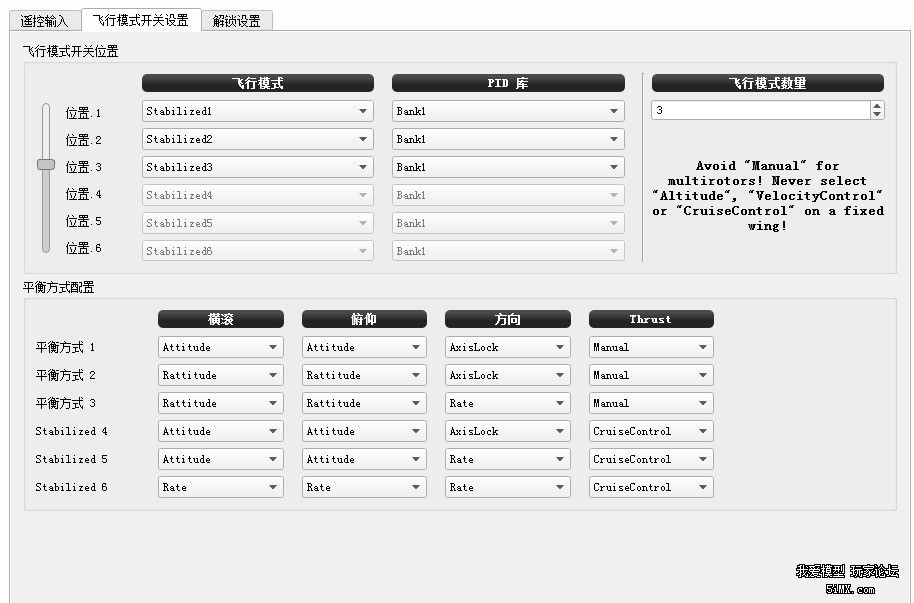 第一页新手的话上面一块用初始值 手动稳定比例就是p,积分就是i,微分就是d,按照教程调。
第一页新手的话上面一块用初始值 手动稳定比例就是p,积分就是i,微分就是d,按照教程调。
