固定翼航测可以更简单
【航测可以更优雅,光环+致导+赛尔】
本文给大家分享市面上比较流行的固定翼执行航测任务的常用设备,和安装注意事项等操作过程。
小编本身是一名航测外场作业从业者,对
无人机航测技术略知一二。目前大疆系列的多旋翼在无人机行业中已经遍地开花,广泛应用于航测、遥感、勘探、监控、植保等领域。

但我还是对固定翼传统航测情有独钟,因固定翼飞行高度高,巡航时间长,作业效率高等优势,有多旋翼不可替代的应用地位。

机体选型
早期的传统固定翼航测大都采用的是轻木+蒙皮+航模
发动机的组合方式,这种方式有不少缺点。
第一,蒙皮材质+轻木的机身,随着时间的推移会发生形变,对飞机的飞行性能和安全性有影响,另外,平时运输过程中也容易被磕碰。

第二、发动机的维护过于繁琐,油针的位置会随使用时间长短、海拔高低、天气冷暖等外界因素而发生变化,每次起飞前经常在地面要做很多检查工作,包括给发动机加油、启动发动机、反复确认大小油针不能有问题等操作。就算在地面做到万无一失,空中还是有熄火的概率,例如飞机进入云层或者突然有下雨的情况出现。

第三,
油动固定翼很少有动力冗余的机体,一般只有一个发动机,发动机一旦空中熄火,只有开伞和滑降两种策略,很不安全。
固定翼的机体和动力形式经过这么多年的迭代,油动固定翼在渐渐退出主流的应用场景,而且现在
电动固定翼的飞行性能已经比以前好很多了,不管是动力套装,
电机、电调、螺旋桨,还是翼型结构,或者是机身的快拆性,都比以前有了很大的提升。不过为了控制成本和后期维护,我还是放弃了玻璃钢或者碳纤维的机体,果断选择了泡沫材质的机体,并且只关注了是双发电机的机体,也符合航空多余度备份原则。

市面常见泡沫机体有双子星、云团、小鹅、光环、奋斗者、信仰者、飞龙等等,从机体内部空间、快拆运输性、价格成本、翼展、航时、后期改造空间等多种因素的综合考虑,长天航空的光环固定翼脱颖而出。
飞控选型
固定翼飞控系统也是有很多选择的,目前常用的有APM、Pixhawk、赫星、飞宇熊猫、MFD果子、创衡、零度、UP、纵横、致导、翔仪等等。

后面几个飞控都是相对比较专业的,价钱相对较贵,但都有自己风格的地面站系统,也都各有千秋,小编综合考虑了成本控制、地面站操作性、地面站图形化设计、与相机的通讯功能、传输距离、应急策略等因素,最终选择了致导飞控。
相机选型
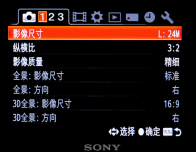
做航测的朋友都知道,成图质量是否能够达到甲方爸爸的要求,相机的技术指标是很重要的一环,之前都是买一个市面上常用的SonyRX1RⅡ或者SonyA7RⅢ

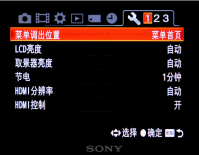
买回来后要先对相机进行一翻设置,如:对焦方式、屏幕显示、感光度、快门速度、自动关机时间、镜头锁定等等,很是麻烦。




而且还要拿到相关的机构去做相机检校操作,最后上飞机前还要考虑安装一个相机的假
电池,和假电池用的可调降压模块。

不然相机自已带的电池不足以支撑完成航测任务。不光这些问题,还有后续的其他一系列的问题,例如,现在甲方都对免像控技术有要求,如果只是在市面上买了一个相机和飞控,而相机和飞控又没有做任何通讯,那么是不可能做到免像控的,只能采用传统的方式,去地面每300米做一个像控点,航飞完成后再做后期处理。综合上面的问题,小编在圈子里各种寻找,终于找到了最佳的解决方案,致导GLC飞控+赛尔相机。

致导的地面站主要是图形化的界面,简单明了,文字性的东西少,按钮大都以图形为主,操作方便。

赛尔相机的特点是,相机的所有设置与检校工作出厂前都已经调试完成了,拿到手后直接连飞控上飞机就可以作业了。

而且赛尔提供了自己的相机管家软件,可以在航飞结束后直接在软件中选择要导出照片的架次和生成相应的后处理软件工程文件,不用象以前一样,飞完还要自己对照片的个数,删除地面试拍点等繁琐过程,现在只需要使用赛尔管家一键导出照片和工程文件,交给内业处理人员就完事儿了,方便加轻松。
硬件、软件与配置
ü 光环固定翼

ü T-Motor2826 550KV,好盈40A UBEC、APC12寸桨、银燕
舵机
ü 致导飞控,包含飞控、GPS磁罗盘、空速计、RTK天线、电台、LED指示灯

ü 赛尔102S五拼相机 / 赛尔6100单镜头相机

ü 中海达基站

ü 千寻账号

ü 电池格氏16000 6S

ü 大疆智图 (Terra) / Smart 3D (Context Capture)

机体、设备安装
光环的舵机机构采用类似于直升机十字盘球头扣的连接方式,这种方式控制连杆,虚位少,精度高,有利于飞机的姿态修正。

另外,舵面连接处光环固定翼采用多个铰链式的结构,这种方式舵面耐用性好,控制精度高,不容易发生断裂。

光环飞机的优势这里不再介绍,本文主要结合航测作业特点,对飞机进行的改造过程。
该机型是给手抛伞降用户设计的,但考虑到手抛的失败可能性和伞降落点的不确定性,小编决定把飞机改造成滑起滑降的方式。所以第一步就是给飞机安装起落架,根据飞机的布局形式判断,这架飞机适合安装后三点起落架。
第一步,先用刀片、锉刀和砂纸把前起落架的位置锉出来,如下图

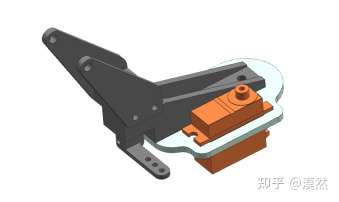
第二步,相同的方式把后起落架的位置制作出来,别忘了给后轮的舵机挖一个槽的位置出来。

为了固定前起落架,需要对电池板进行改造,留出安装前起落架的螺丝孔位,小编自行画了一个二维的图纸,加工出来后把板子用泡沫胶粘牢。

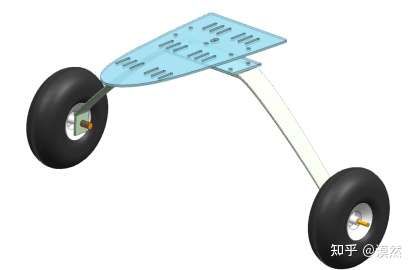
前轮三维示意图
考虑到应对各种降落场地可能是草地、土路、石子路等复杂路面,轮子我选了5寸的大脚,越野能力超强。

下面给后起落架安装固定板,我采用的是环氧树脂和玻纤维布的方式加固这个板子,防止飞机在降落后,起落架被杂草挂掉。

树脂大约需要12个小时可以固化,然后才能进行下一步聚。下面安装后起落架,如下图所示,这种铝制的起落架结实耐造,另外加上光环固定翼自带的球头结构的舵机连杆,让转向不再有虚位出现,后三点起落架也能象前三点那样有很好的方向操控性。另外,我在机身接缝处也用环氧加玻纤布的形式进行了加固,这样在重降落的时候机身不会裂开。

安装前起落架加固板,如下图,采用机身外部与机身内部夹层的方式固定起落架安装板,使用四个M4的螺丝贯穿两块层板,层板有树脂和玻纤布加固。


前起落架采用3~5个M3的自攻螺丝安装固定,这样做的好处是,对于常规的滑跑降落这3颗自攻丝完全可以胜任,降落的冲击力不会对起落架和机身造成损害。但对于重降落或者操作不当飞机冲出跑道撞击到马路牙子上等类似情况出现的时候,由于飞机前轮突然停止,飞机的惯性会把这3个自攻螺丝拔出来,这样可以起到缓冲的作用,保护了飞机不会向前翻转打滚和机身不会撕裂的情况出现。而且拔出来的螺丝并不会影响二次使用,在原来的螺丝孔位上滴些502或者AB胶等填充物后,自攻丝还可以安装在原来的位置上。

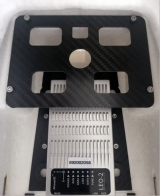
下面处理飞机自带的设备舱。
个人感觉光环的设备舱虽然是设计出来了,但是厂家没有给出安装方案,希望后面厂家有所改进,这里我分享一下我的做法。下图中黄色虚线内的是大家在航模上用的座舱或者电池舱的开关插销,前后左右我分别装了四个,都是采用泡沫胶粘的固定方式。


另外在机身内侧配上合适孔径的空心铝柱,如下图,这样就可以实现快速把设备舱和相机一起从机身上拿下来,这样的操作对后期导出照片和维修设备,或者安装机身内部设备,如飞控、电台、空速计、电流计等模块带来方便。


等快拆件的泡沫风干牢固后,在设备舱上用开孔器,开出与挂载设备匹配的孔。

然后把提前设计好的设备挂载板用泡沫胶粘到设备舱内部,如下图

赛尔6100相机的安装方法,示意如下:


赛尔102S相机的安装方式,示意如下:



两个事儿一定要记着,起飞前把镜头盖去掉; 降落后第一时间把镜头盖装上,不然平时放置或者搬运的时候很容易划伤UV镜。

在设备舱的后面用泡沫胶固定飞控安装板和设备安装板,设备安装板采用四个M3螺丝可拆卸固定方法,这样方便把一些辅助设备如,外置电台、空速计、电流计、电源模块等进行更换操作。

飞控采用转接板拧M3螺丝的方式与飞控板连接,这样做的好处是可以保证飞控安装与拆卸的一致性,也方便更换其他厂家飞控。

下面展示一下设备舱安装前与安装后的效果


赛尔102S安装示意,如下图:

给电台天线设计一个3D打印的安装座



电台天线平时不用的话把飞控自带的红色保护胶套装上,可以防止碰撞和灰尘进入,造成接触不良。

GPS与磁罗盘天线安装到飞机预留的
图传电台天线的位置上,因飞控已经把电台内置了,故而这里正好空出来给GPS用。

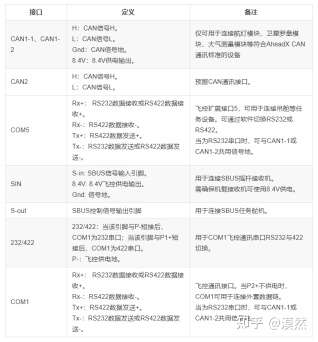
下面给飞控做线,请根据自己的功能需求结合致导科技提供的接线定义,自行制作,不清楚的请联系导致科技技术人员。飞控接线面板最下面一排线的定义如下:
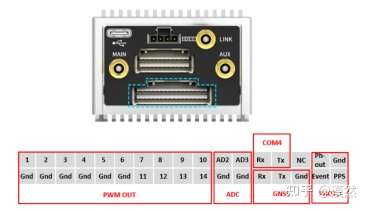

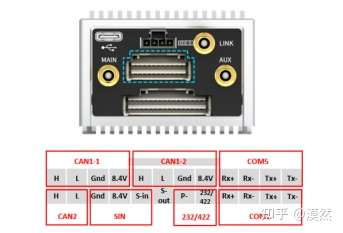
接线面板中间一排线的定义:
线材准备完毕后,把飞控面板上需要安装的线都接上,按照从下向上的顺序接入,先接入最下面的与飞行相关的线材。

然后接入中间层与外围辅助设备相关的接口

接入飞控自带的RTK差分天线的主天线

接入差分副天线

接入电台天线

最后接入电源,插电源插头的时候,一定要听到“咔”的一声,说明插头连接到位了。

安装机身上RTK天线固定座,同样是采用3D打印的方式固定RTK天线于机翼外表面。



同样,与电台天线一样,平时不用的时候用胶头套上,起到保护作用。

把安装辅助设备的固定板装上
安装空速计模块,致导的空速计模块有点像Pixhawk的设计,都是采用外接式的,我觉得这样挺好的,这样做的好处是,可以有效的减少空速软管的距离,利用电信号来传送数据,减少空速误差。

空速计安装完毕后给空速管的接口装一个夹子,防止震动脱落

飞控与相机参数设置
飞控与相机按照上面的步骤安装完毕后,下面要进行软件方面的设置。首先是打开致导的MasterEasy软件,在软件中进行相机参数设置。按照下图示,把COM4接收和发送都设置为“5拼相机”,波特率设置为:256000

另外还需要设置RTK差分天线和相机相对于飞控的安装位置,请参照下图,详情请查阅致导科技相关说明,或者咨询致导技术人员。

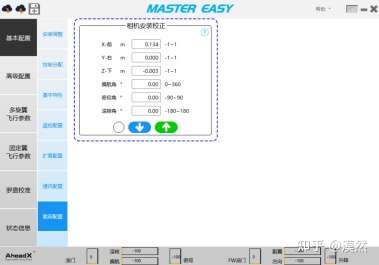
致导飞控与赛尔相机是做了系统集成的,可以在致导的地面站上看到相机的相关信息,并且可以对相机进行设置,这样很是方便。


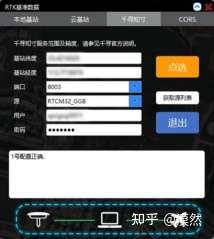
致导的地面站也跟大疆类似,有可以登录千寻账号的界面,这样就可以直接使用差分数据进行高精度定位了,为免像控提供了基础数据。千寻数据连接成功后,RTK基准数据面板下面会有绿色的连线,表示通讯成功,可以正常使用差分数据进行高精度定位。
同时赛尔相机也有相应的数据导出操作软件,赛尔航测管家,在进行数据处理前,使用赛尔管家可以快速的把想要的飞行照片和数据统一COPY出来,直接生成后处理软件的工程文件,如CC或者Terra,也是非常方便的。


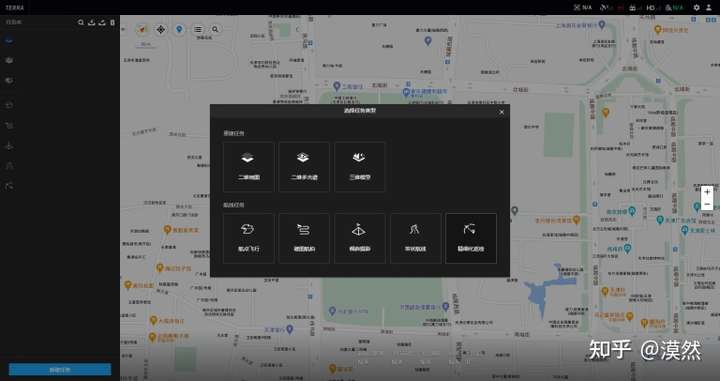
最后就是在CC或者Terra中自行跑图啦

外场照片








 /1
/1 



 发表于 2021-7-27 11:51
发表于 2021-7-27 11:51



 收藏
收藏
