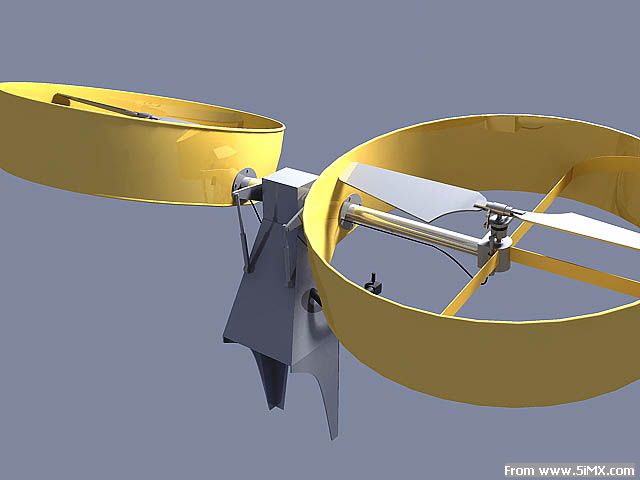
飞行器由一台电动机通过传动轴系统驱动两只可变桨距的螺旋桨产生升力,两只螺旋桨相对反相旋转用以抵消反扭力。

如示意图所示,电动机位于机体中央,通过减速组驱动主轴中部的伞齿使主轴旋转,再通过主轴两侧的伞齿驱动螺旋桨产生升力。
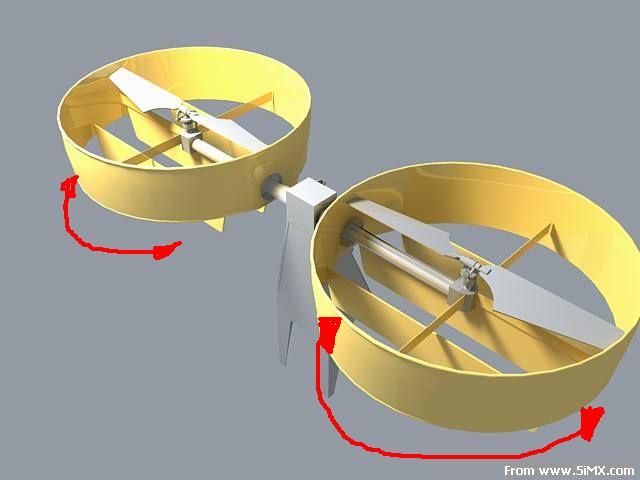
此飞行器的控制应用了矢量推移原理。两侧的两个螺旋桨驱动轴外轴套可以自由转动,使螺旋桨产生前后倾斜用以控制机身姿态。
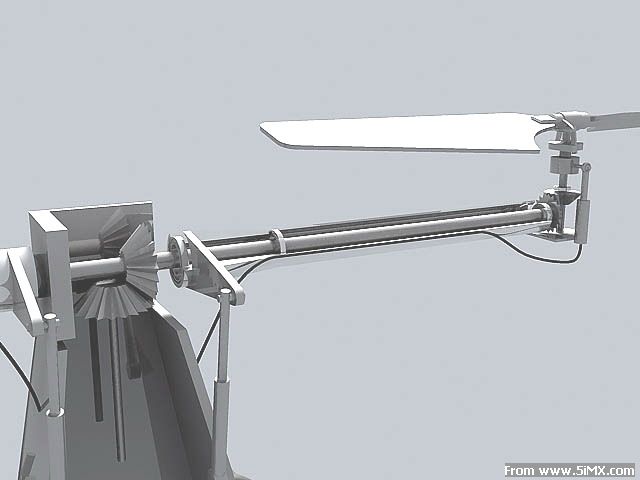
此图为机身后侧示意图。每个风扇的前后倾斜各由一个舵机控制。

当两个舵机推杆同时使两个风扇前倾时,产生向后的推进力使得飞行器向前飞行。
当推杆使得两个风扇产生角度差时,可以使飞行器原地左右转向。
飞行器的两个螺旋桨为可变距式,变距单元分别由一个舵机控制。变距舵机固定在轴套上,随着风扇的倾斜同步转动。当飞行器处于悬停状态时,一侧的螺旋桨桨距改变,使得两侧风扇产生升力差,可以使飞行器产生侧向偏移,也就是横滚动作。当飞行器向前飞行时,改变一侧桨叶的桨距可以使飞行器产生水平转向动作。
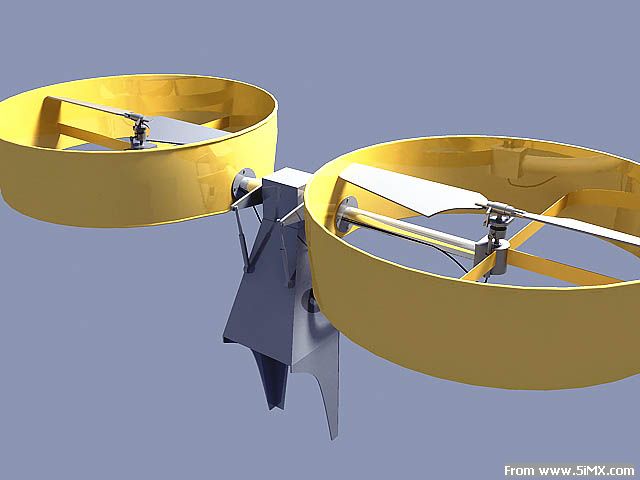
通过简单的控制两个风扇的倾斜角,以及两组桨叶的桨距,此飞行器就可以在三个自由度运动,可以完成所有直升机的动作(倒飞除外)。还可以通过一轴或多轴陀螺仪经过单片机处理来自动保持飞行器平衡。
ps: 3d效果图我是按照个人飞行器的思路画的,控制部分本应该是舵机的地方是用液压推杆表示的,原理一样。
正在准备着手制作一个无刷电机为动力的模型。大家给点意见~~ |



 /2
/2 


 发表于 2004-9-8 06:15
发表于 2004-9-8 06:15