5iMX宗旨:
分享遥控模型兴趣爱好
航模爱好趣无穷,正确操纵是关键。莫把器材当玩具,忽视安全悔一生。
新手好问勤练习,远离人群勿炫耀。天下模友一家人,共建美好新生活。
车贴申请
|公众号与手机端
|帮助
|
积分说明
|
求助
请
登录
后使用快捷导航
没有帐号?
我要加入
手机用户
登录
商城
论坛
收藏
打开手机扫一扫
快捷导航
首页
视频/图赏
新手课堂
5iMX社区
新闻 | 观点
5iMX评测室
5i上头条
【搜索】
5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年)
»
5iMX社区
›
遥控直升机模型(EP/GP Heli)【技术专栏】
›
电动遥控直升机
›
共轴双桨自动驾驶直升机
1
2
3
4
5
6
7
8
9
10
... 41
/ 41 页
下一页
返回列表
楼主:
c_nmusic
共轴双桨自动驾驶直升机
[复制链接]
110351538
110351538
当前离线
积分
1375
101
楼
发表于 2008-5-24 10:28
|
只看该作者
加油哦~
欢迎继续阅读楼主其他信息
主题
共轴双桨自动驾驶直升机(二)之四轴飞行器篇
2009-05-20
请问关于T6C遥控距离变短的问题
2009-02-09
我终于能让火狐100在空中停留5秒钟
2008-09-14
我是这样调整好0704A陀螺仪的
2008-04-27
第一次自己动手安装火狐100
2008-04-16
好赢10A无刷电调接反以后
2008-04-15
看我是怎么找到ENC-03陀螺仪芯片的
2008-04-08
共轴双桨自动驾驶直升机
2008-04-01
没有相关信息
没有相关信息
没有相关信息
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
lwjmf
lwjmf
当前离线
积分
2937
102
楼
发表于 2008-5-24 11:48
|
只看该作者
很好~很强大!继续发扬!
【论坛帮助】
回复
举报
zqzzy
zqzzy
当前离线
积分
2497
103
楼
发表于 2008-5-24 12:59
|
只看该作者
这种贴要死顶。lz牛人一个。
【网上礼节十条】
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
104
楼
楼主
|
发表于 2008-5-24 15:10
|
只看该作者
用便宜元件搭的电路效果就是比较一般啊。目前的几种传感器模块精度都不是很高。
上午修改了一下二维磁阻传感器的电路,稍微好了一点,转动45度的范围能大概区分开了。估计是放大电路的布线问题造成干扰很厉害的。这个磁阻芯片的输出电压非常小,要放大将近1000倍才能使用。布线时输出距离放大电路远了点,中间被别的信号给干扰了。
目前的超声波模块精度也不高,我先没有让它计算实际的距离,就用一个简单的循环累加计数来看回波和发射的时间间隔。目前的输出数据也就百位还比较准一点,大概能知道一个距离范围。
不过检测不到回波的返回数据还是很准确地。:em15:
至于陀螺仪和加速度计,也都马马虎虎了。反正都是便宜货,要求也不能太高了。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
105
楼
楼主
|
发表于 2008-5-24 18:23
|
只看该作者
简直是没天理。
刚才把螺旋桨都拆了,比较了一下带原装4合1的LAMA和我改造的LAMA,在马达转速中等的情况下,对于偏转的相应情况。
原装的LAMA反映非常迅速,一有偏转立马可以听到马达改变转速的声音变化。而我的LAMA简直是反映迟钝,转动都停止了才想起来改变马达转速纠正。
代码查了半天也没结果,最后看到原理图上的高频和低频滤波电容,试探性的把这几个电容拆了。结果,我的LAMA现在也变得反映迅速了。
比较没有天理....:em17:
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
106
楼
楼主
|
发表于 2008-5-24 20:22
|
只看该作者
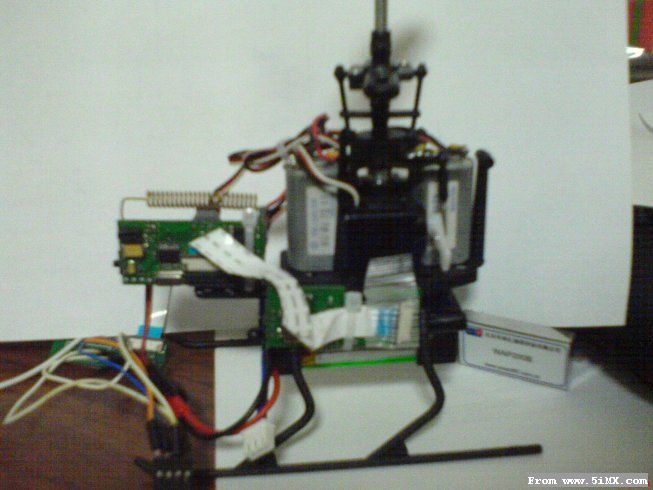
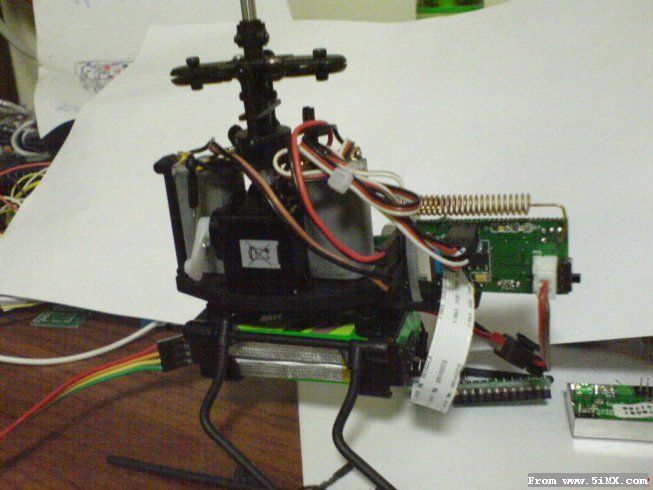
目前的安装方法,陀螺仪放到了电池旁边。
回头去买些长一点的排线,应该能放到干扰更少一点的地方。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
107
楼
楼主
|
发表于 2008-5-24 21:24
|
只看该作者
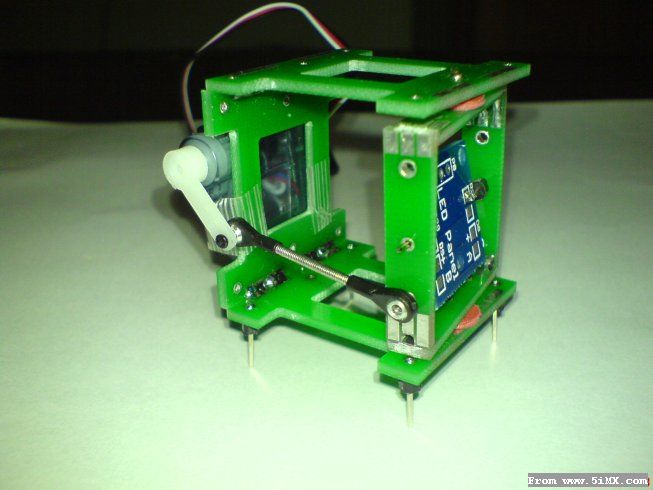
云台和舵机。
图里只有一维的控制,另一维在摄像头的控制板上,这个板子还没做好。
随便找了以前的一块小板装上看看样子。
外框架的设计有些问题,这一维球头应该安装到上面比较好,但预留的距离不够,当时没有想好,现在先这样将就吧。
拍摄角度不是很大。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
108
楼
楼主
|
发表于 2008-5-25 20:43
|
只看该作者
今天比较郁闷。
根据昨天的发现,今天把玩具双桨的电路也做了相同的调整,把2个电容去掉了。现在MCU对陀螺仪的反应更加迅速了。
不过问题也出来了。根据以前的算法,发现偏差后就一直纠正,直到没有偏差位置。现在反馈速度快了以后,这个纠正表现为一下子一个桨转速降低到底,另一个桨正常。稍微偏一下2个浆的状态就反过来。造成起飞的时候都只有1个螺旋桨在转了。另一个螺旋桨的转速被纠偏的调整降低到都不转的地步了。
还需要想一个更好一些的算法啊。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
109
楼
楼主
|
发表于 2008-5-25 20:54
|
只看该作者
根据我的观察,LAMA的算法应该是一种比较固定的算法。
比如发现陀螺仪的数据离中立点偏差-40,那么上螺旋桨减慢10,下螺旋桨增加10。诸如此类,一步到位。
我现在的算法是逐渐逼近,有偏转就一直不停地修正。直到不偏了或达到最大修正幅度为止。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
110
楼
楼主
|
发表于 2008-5-26 20:05
|
只看该作者
经过一天的仔细观察,终于了解了LAMA的算法并成功用到我的玩具飞机上。
这个算法也真够简单的,最最核心的部分只要3行就完成了。如果加上限幅及微调的代码,也才11行就足够了。
大概说一下吧。
一切的数据,都要从陀螺仪的输出数据开始。因为在飞机刚加电初始化时,可以得到一个陀螺仪静止状态下的中立点。所以当飞机开始飞行后,如果出现偏转,都可以通过将陀螺仪的实时数据和中立点比较,得出一个或正或负的差异。这个正负就说明了飞机的旋转方向,而这个数据的绝对值大小就是旋转的角度。
利用正负,可以知道应该给哪个马达加速,给那个马达减速。比如我的飞机上,如果为正,说明飞机顺时针转。纠正的方法就是要提高顺时针转的马达的转速,同时减少逆时针马达的转速。我在模拟LAMA的算法里,直接把这个角度信息作为增加或减少的具体数值。于是飞机就可以非常快速地修正旋转。这里有一点要注意的,就是这个偏差值是需要累加的,这样才会不断地修正偏转。
LAMA的算法里,在没有检测到旋转的时候,是逐渐降低修正参数,直到为0。这部分我以前没有写,所以造成起飞的时候由于上次修正的关系,可能一个马达转,一个马达不转。这个逐渐递减的代码也非常简单,就是一个比较和减法就搞定了。
明天继续试飞,看看新加的中立点调整的算法是不是真的很管用。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
小扬`
小扬`
当前离线
积分
105
111
楼
发表于 2008-5-26 22:05
|
只看该作者
有意思:em26:
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
112
楼
楼主
|
发表于 2008-5-27 11:28
|
只看该作者
还是比较让人郁闷。
虽然微调也确实可以发挥作用,但经过反复尝试,发现效果并没有好过以前的算法。最后的非常缓慢的旋转依旧存在无法克服。
不知道各位LAMA调整到可以只管一个油门的时候,机身不自旋的时间能维持多久。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
113
楼
楼主
|
发表于 2008-5-27 15:28
|
只看该作者
给LAMA的控制板看来是布线的问题,干扰总是非常大,马达一转起来基本收不到什么数据了。而换成以前给玩具飞机的电路板就没问题。
现在不敢装螺旋桨了,飞起来停不下来就麻烦了。
电路板要重新布线,重新送去做板。又要一段时间了。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
59hang
59hang
当前离线
积分
2354
114
楼
发表于 2008-5-27 15:33
|
只看该作者
才看到此贴,LZ很强啊,要顶,LAMA是很稳定的,调好的机脱手5秒是不难的,
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
zstommy
zstommy
当前离线
积分
4221
115
楼
发表于 2008-5-27 16:39
|
只看该作者
一口气看完了8楼高的大厦...结果强啊...
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
116
楼
楼主
|
发表于 2008-5-27 20:03
|
只看该作者
回复 #114 59hang 的帖子
1分钟可以吗?我自己的LAMA坚持不了5秒就开始或左或右平移,这时就必须动控了,否则就撞墙了。
目前我的玩具机机最好的纪录是10秒内没有任何偏转,但是再长就不行了。不是左旋就是右旋,虽然速度很慢。
比较郁闷。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
c_nmusic
c_nmusic
当前离线
积分
609
117
楼
楼主
|
发表于 2008-5-27 21:38
|
只看该作者
目前的重点转移到板子的重新设计和软件模块编写上。
目前已经有好几种板子了,最近要把输入/输出接口都统一一下。凡是采用了MCU的板子,都包括一个ISP和2个I2C的端口。2个I2C的目的是因为用的这种高密度插座,2头的引线顺序刚好相反,所以只好没种板放2个顺序相反的I2C插座。虽然麻烦些,但冲着这个插座和线的重量上,也值了。线加插座才1克多一点,而一般的2.54间距的一个3P插头就比这种重了。
还要设计一个核心的MCU处理器板,用来将3轴陀螺仪,3轴加速度计,2维磁阻传感器和超声波以及将来可能的红外平衡仪的数据综合起来处理。这个用51是肯定没戏的。目前想采用AT的ARM7芯片。然后通过I2C总线指挥各个51的马达/舵机驱动板去执行各种动作。
现在的板子一块上都拼了好多个小板子,为了不让制版厂家有借口多收我钱,板和板之间什么过孔,开槽都没有。拿回来我自己锯,顺便练习一下木工活。所以这次我想多拼几种MCU处理器板,把LPC的MCU也放上去,然后实际比较一下到底哪种效果好。上一块带8通道舵机处理板,遥控汽车的控制板,调试板,摄像头子板,摄像头数据处理板等一共8种板的电路板,商家也才要我300块。还是很合算的。如果单块做,每种板最低收费要200呢。
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
枫囝
枫囝
当前离线
积分
2237
118
楼
发表于 2008-5-27 23:29
|
只看该作者
看到这里!期待
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
59hang
59hang
当前离线
积分
2354
119
楼
发表于 2008-5-28 09:56
|
只看该作者
我的观点不知对不对,LAMA的稳定性和装了MFA平衡仪的单翼直机差不多了,它的上翼起了很好的重心平衡作用,但水平漂移是受气流影响,要保证自动悬停在小范围内,用helicommand3D 平衡仪中使用光电鼠标原理克服水平漂移,应该很有成效.其实光电鼠标的芯片就有四个方向位移的判断和输出.
电直虽小,技术含量很高,期待看到LZ的成果.
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
huhu.zz
huhu.zz
当前离线
积分
10
120
楼
发表于 2008-5-28 12:28
|
只看该作者
太强了,武装到牙齿,我看就差惯性导航了,呵呵
本论坛上传图片、B站视频、抖音视频、附件指南
回复
举报
1
2
3
4
5
6
7
8
9
10
... 41
/ 41 页
下一页
返回列表
高级模式
B
Color
Image
Link
Quote
Code
Smilies
您需要登录后才可以回帖
登录
|
我要加入
本版积分规则
发表回复
回帖后跳转到最后一页
浏览过的版块
积分商城
军卡与坦克仿真模型
像真船模讨论区
模型配件、模拟器综合讨论区
固定翼精彩视频与图片
签到专区
航模新手学堂 (Beginners)
模型大工具与DIY机械栏目
活动图片、视频、各地模友闲聊专栏
穿越机综合技术讨论区
关闭
【站内推荐】
/2
德国ScaleArt发布MB-trac 1800 1/14比例拖拉机模型
2025年10月,德国殿堂级功能仿真模型制造商ScaleArt宣布推出基于梅赛德斯奔弛MB-trac 1800经典拖拉机的1/14比例仿真液压模型。
查看 »
4K/120帧,大疆最新O4数字图传体验
DJI天空端已经来到了第四代,每次迭代都带来了新的体验。O4相较于O3高度降低了1.5mm,重量轻了7g,具备4K/120帧拍摄能力…
查看 »
快速回复
返回顶部
返回列表



 /2
/2 


 发表于 2008-5-24 10:28
发表于 2008-5-24 10:28
 楼主
楼主