上周,瑞士联邦理工学院教授以及「Verity Studios」工作室的创始人拉菲罗·安德烈(Raffaello D’Andrea),在TED2016的演讲台上生动地展示了他的全系列新奇飞行器。包括有:立式垂直起落飞机(Tail-Sitter),一个小巧的、固定翼飞机,它可以在干扰之后恢复到最佳的稳定位置,并且可以从盘旋平稳地过渡到向前和向后飞行。单螺旋机(Monospinner),世界上机械最简单的飞行器,只有一个单独的运动部件。全向直升机(Omnicopter),世界首个能从自身方向和旋转状态切换到任何飞行方向的飞行器。还有合成蜂群(synthetic swarm ),萤火虫般盘旋在观众头上的33只迷你飞行器。

从安德鲁最新演示的这些作品,可以看出他致力于提升自主飞行器所能够达到的极限边界。一个核心的要素是「定位」:要让功能自主化,机器人必须知道他们处于空间的什么位置。之前,他的团队依靠的是一种外部的高精确运动捕捉系统来定位,这需要在苏黎世联邦理工学院的「飞行器舞台(Flying Machine Arena )」里面才能实现。这意味着在实验室之外,这个算法是很难演示的。也意味着 在动作捕捉系统的中央处理器上会存在一个「单点失误SPOF」——这是任何「安全关键系统」的高发问题点。
注:「飞行器舞台(Flying Machine Arena )」是一个适用于自主飞行器的便携式空间,有10立方米,包括一个高精度运动捕捉系统,一个无线通讯网络,一套执行复杂算法的软件来实现预测和控制。
换一句话说,安德烈教授和他的团队现在展示了一个新开发的、双倍自动备援的定位技术,这个技术来自从他实验室剥离出来的「Verity Studios」工作室。这给飞行器和机器人的自主性赋予了一个新的水平。在这些生动的展示中,所有的飞行器使用了机载传感器——决定飞行器的空间位置,还有机载计算器——决定怎样运动。没有外置的摄影头。机器人接受的、仅有的遥控指令就是高级别的指令,例如「起飞」或「着陆」。
几十个飞翔在观众头顶上的飞行器的飞行动作非常自然,也是大大超过先例。在演示的飞行器里,还包括一个比较重的、高性能的四翼直升机,具有自动备援功能并且应用了「艺术范儿失效保护算法」,还有其他一些机载、非机载特性。
各类定位系统有很多失败的模式,同时也有很多种安全和备援特性,TED的组织者对此进行了广泛的讨论,并对此系统的安全可靠性给予了十足的信心。为了战胜「无人机禁止在会场使用」的法规,TED主办方甚至决定承担会场的失误赔偿。以下就是演讲视频。
演讲稿:
一个业余爱好者平台的起点是它有望成长为一个价值数十亿美元的产业。检验、环境监测、摄影与电影和新闻:这些是商业无人机的一些潜在应用,而其推动它们的则是全世界的研究机构所正在开发的各种功能。例如,在空中包裹递送进入我们的社会认知之前,一队自动飞行器就曾在法国FRAC中心当着现场观众的面用1500块砖块建造了一座高达六米的塔,而几年之后,它们又开始牵着绳子飞。用绳子系住这些飞行器,可以让它们在非常狭窄的空间中获得很高的速度和加速度。它们也能自动建造张力结构。学会的技能包括怎么负载、怎么应对干扰以及一般地怎么与物理世界交互。今天我们想向你展示一些我们正在努力的新项目。它们的目标是推动扩大自动飞行的应用范围。
1、Tail-Sitter – IDSC, ETH Zurich
现在对一个自动化工作的系统而言,它必须完全知道其移动物体在空间中的位置。回到我们苏黎世联邦理工学院实验室,我们通常使用外部相机定位物体,这让我们可以将精力专注于高动态任务的快速发展上。但是在今天的演示中你将看到,我们将使用由我们实验室的一个分支机构Verity工作室开发的新定位技术。这里没有使用外部相机。每一架飞行器都使用机载传感器确定自己的空间位置,使用机载计算确定其应该进行的下一步动作。仅有的外部命令是比较高级的命令,比如「起飞」和「降落」。
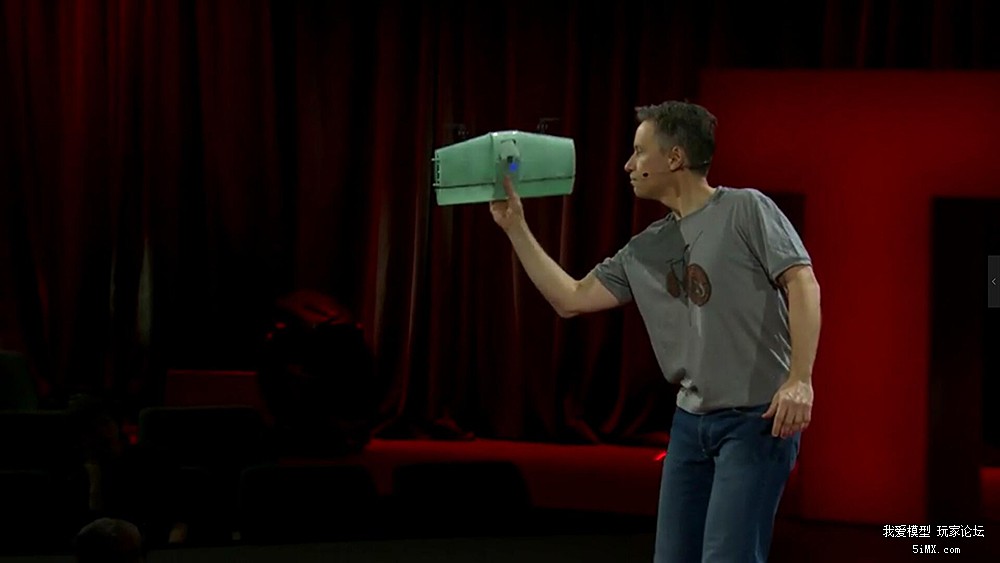
The Tail-sitter. Photo: Bret Hartman / TED
这就是所谓的立式起落飞机(tail-sitter)。它是一种试图兼得鱼和熊掌的飞机。和其它固定翼飞机一样,它向前飞的效率更高,远远超过直升机及类似的变体。但又和其它的固定翼飞机不同,它能够悬停,这让它在起飞、降落和通常的动作上拥有巨大优势。很遗憾天下没有免费的午餐。立式起落飞机的一个局限是它们容易受到阵风之类的干扰。我们正在开发一种新的控制架构和算法来解决这样的局限。我们的想法是让飞机无论如何都要恢复其原有的状态,而通过训练,还能够随着时间提高其效能。
2、Monospinner – IDSC, ETH Zurich

The Monospinner. Photo: Marla Aufmuth / TED
做研究时,我们经常问自己一些基本的抽象问题,以试图了解问题的核心。比如说,有一个这样的问题,受控飞行所需的最小组件数量是多少?现在,也有现实的原因让你想要知道这类问题的答案。例如直升机,人们深切地认为它是一种带着上千个谋划着给你带来身体伤害的运动部件的机器。事实证明几十年前,熟练的飞行员有能力遥控控制只有两个运动部件的飞机飞行:一个螺旋桨和一个尾翼。我们最近发现只要一个(运动部件)就够了。这是一个单螺旋机(monospinner),世界上机械结构最简单的可控飞行器,几个月前才刚被发明出来。它只有一个运动部件:螺旋桨。它没有襟翼、没有铰链、没有副翼、没有其它执行器、没有其它控制面,只有一个简单的螺旋桨。尽管机械结构很简单,但要让它稳定飞行并移动到空间中任意想要的位置,还需要在其小小的电子大脑中下一番功夫。即便如此,它还没有立式起落飞机的复杂算法,这意味着如果想让它飞起来,我必须正确地将其扔出去。而因为我正确扔出的概率非常低,因为大家都在看我,我们就展示一下我们昨晚拍摄的视频好了。
3、Omnicopter – IDSC, ETH Zurich

The Omnicopter. Photo: Bret Hartman / TED
如果单螺旋机只算是简朴的实践,这里的机器,带有八个螺旋桨的全向直升机(omnicopter)就算是超量的实践。可以用这些盈余做些什么呢?要注意它是高度对称的。因此,它完全不具有方向性。这给它带来非凡的能力。如果不考虑需要面对的方向和怎么旋转,它可以移动到空间中任何想要的位置。它也有其自身的复杂性,主要的问题是在8个螺旋桨所产生气流的交互上。其中一些问题可以通过建模解决,而剩下的需要在飞行中学习。让我们来看看。
4、Fully redundant multicopter – Verity Studios
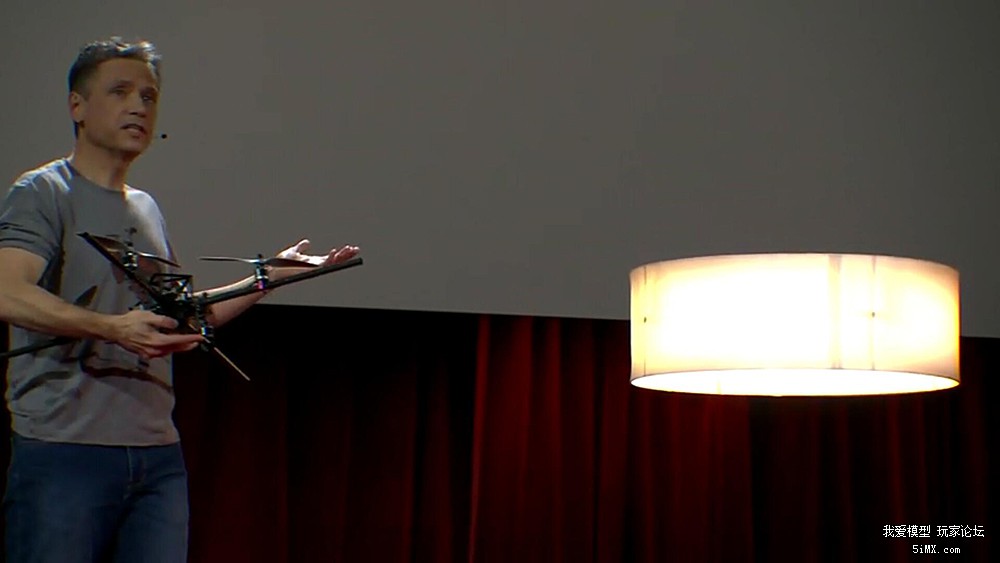
Fully redundant quadcopter. Photo: Ryan Lash / TED
如果飞行器要成为我们日常生活的一部分,它们需要变得非常安全可靠。这个机器事实上是两个独立的双螺旋浆飞行器。这一个想顺时针旋转。另一个想逆时针旋转。当你将它们放到一起时,它们的行为就像是一架高性能四轴无人机。但如果出现问题——电机故障、螺旋桨故障、电子组件甚至电池组故障——这个机器仍然能飞,尽管性能下降了。现在我们将向你们展示一下禁用其中一半时的情况。
5、Synthetic swarm, 33 small flying machines – Verity Studios

Photo: Bret Hartman / TED
最后的演示是融合机群(synthetic swarm)的探索。大量自动的、协作的实体为审美表达提供了新的调色板。我们使用了商业微型四轴无人机,每一个的重量都低于一片面包,顺便一提,它们配置了我们的定位技术和自定义算法。因为其中每一个单元都知道其在空间中的位置并能自己控制自己,那它们的数量上就不存在限制。(掌声)希望这些演示能激发你梦想飞行器具有的新的革命性角色。比如说这里超安全的那个有志向成为百老汇的飞行灯罩。(笑声)现实情况下很难预测新生技术的影响。而对于我们这样的人,真正的奖赏是创造的旅程和行为。它不断提醒着我们我们生活的这个宇宙是多么美妙而神奇,让有创造力的聪明的生物能以这样壮观的方式雕刻它。事实上,这项技术的巨大商业价值和经济潜力只是锦上添花而已。谢谢。
本文来源:机器之心

责任编辑:5imx
业界快讯 More
- 12-26 【5iMX新闻中心】卡勃力特发布6x6全轮驱动
- 12-26 品牌合作丨 Flysky&Sunpadow FS-ST8、FS-
- 08-15 航模行业新生力量!星奇世界发布 STARGAZER
- 10-26 FMS新品:1/12比例德国82型越野车
- 09-26 1:16 AVVX 验证型两栖战车中秋节正式服役

- 活动
- 精华
More
-

挑战“祖母石绿”——为LIKERC U535增添高
祖母石绿,绿色系中最高贵的绿和最深邃的绿。加入了黑色,在阳光下呈现出祖母石一般的高贵。 弱光下绿色隐去,换而以接近黑色的暗黑绿替代… -

【5iMX评测室】卡勃力特新品K3364 6x6全轮
“前2后8”在当今依然是最主流最正统的自卸车类别。这种配置了3根车桥的自卸车,具有十分经济的装卸运载能力,深受业内人士的喜爱。 K… -

4K时代,大疆新一代穿越机图传套件O3 Air U
4K FPV过去只能挂GoPro或者OSMO Action,不仅笨重,而且麻烦,现在大疆全新一代4K画质的O3 Air Unit终于来了,与之搭配的还有Avata上面那套…
-

垃圾堆捡了个JR260,没想到 哈哈!
飞机炸机了,螺丝生锈严重 看着挺惨的 旋翼头螺丝也生锈了,便宜就行,抱着买配件的态度拿下,实在不行就拆些能用的 … -

时光鸟滑翔机组装全过程,第一架轻木套材
非常好带,上地铁很方便 … -

新疆石河子市第三十五届航空模型、第二十三
石河子地区航空航天模型比赛随拍几张。 回忆下1989年石河子比赛 …
阅读排行 More
-
01
矢量转向遥控风筝,简单易飞,适合亲子娱乐
入模很多年了,也飞过不少飞机。一直 ... -
02
固定翼玩家入门穿越机
拍张照留个纪念 ... -
03
90后中国“学渣”,研发机器人,横扫美国科
90后中国“学渣”,研发机器人,横 ... -
04
曾经的“翼风男孩”,还是打破世界纪录的上
曾经的“翼风男孩”,还是打破世界纪 ... -
05
百度百科
百度百科 https://vhsagj.smartapps.b ...
 /1
/1 
