本帖最后由 yezack 于 2017-1-22 19:29 编辑
先上板子:

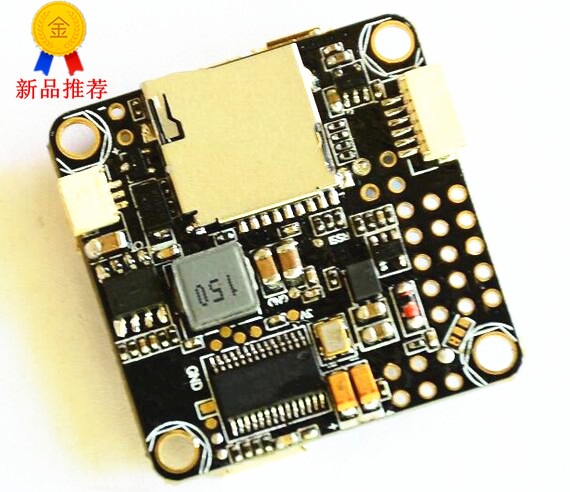
注:这是某宝可以买到的山寨版
原版:https://www.rcgroups.com/forums/showthread.php?2801694-Omnibus-f4-pro
先来看看简介(原版):
SPI Gyro MPU6000
SPI接口mpu600陀螺仪加速剂
On-Board OSD (controllered by Betaflight, FC over SPI bus)
板载OSD(可以用BF调参软件控制,通过SPI接口与飞控连接)
MicroSD Blackbox
黑盒数据保存至SD卡
Baro (BMP280)
气压计
F4 Processor (F405)
F405处理器
5v3a SBEC
自带5v3A的BEC
Built-in Current Sensor
板载电流计
On-Board Video Filter (only can supply 5V to VTX and Camera)
板载视频滤波(只支持5v输出到 图传及摄像头)
接下来看看接线方法正面:

背面:
电源接入: 电池正极接入<BAT+>(正面),负极接入<GND>(背面),电源支持范围2-4S。
接收器接入:
PPM与SBUS接口相同,都在<J7>(正面)
摄像头接入:
<J17>(正面),注意:RAM为正极,AGND为负极,电压可选
图传接入:
<J16>(正面),注意:RAM为正极,AGND为负极,电压可选
注:RAM的电压由<J3>(背面)的跳线决定,如果<J3>的RAM端与5V短接则<J16>与<J17>的RAM输出为5V(有稳压滤波)
如果<J3>的RAM端与VCC短接则<J16>与<J17>的RAM输出为电池电压(无稳压滤波)
电调接入:
<J14>1号电机,<J15>2号电机,<J13>3号电机,<J12>4号电机(均在正面)
注:如果要使用电流计及Mah监测功能,请保证电调或分电板的输入从<MOTO_VCC>(正面)引出,而不是从电池引出
BB响:<J2>(正面)
固件:
使用Betaflight调参软件刷入,类型为OMNIBUSF4SD
注:该版为新版本,还无稳定版本,轻勾选[show unstable releases]否则无法看到固件。
未完待续...
|



 /1
/1 



 发表于 2017-1-22 18:58
发表于 2017-1-22 18:58

 收藏
收藏 楼主
楼主






