文图 ANTILL
对于模型发烧友来说,自己组装一架带有飞控的无人机比直接购买一架成品机有乐趣的多,但是同时对自己也是一个很大的挑战,如果你并不是那么有经验的话……
而对于我,已经组装过各种型号的飞控,我很早以前就有想,有没有和F3F4大小的飞控,又具有开源飞控全部功能的飞控,能够便捷地装在穿越机亦或者是固定翼上又不需要过多考虑走线连接问题,美观且功能强大。
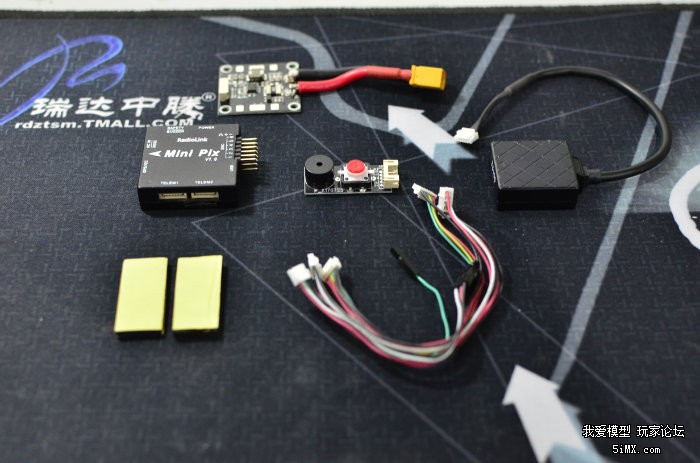
今天有幸拿到了乐迪 Mini Pix ,究竟它能否满足我的需求呢,我门拭目以待,首先来看一下他的外观:
开箱篇
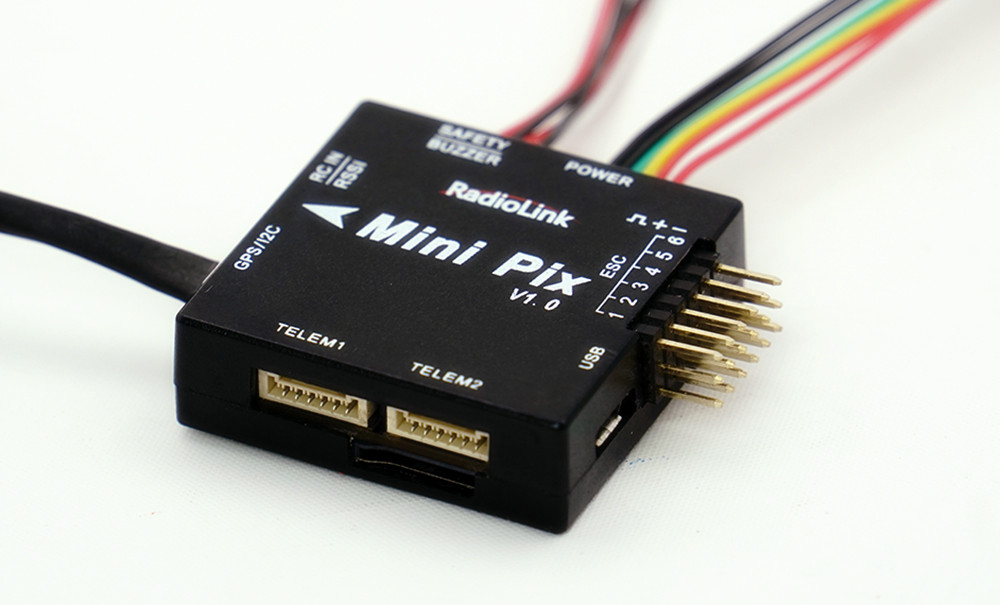
Mini Pix正方的外形与一般的穿越飞控并无二致,主要接口有:

两个扩展口

电源、喇叭、安全开关

RC RSSI 和 GPS接口

最大支持六轴

配套M8N GPS

配套分电板带电流计 2-4s 最大支持30Ax4=120A电流

安全开关和集成喇叭

飞控 14g

GPS 22g

分电板 14g

安全开关 3g
总重53g,用在250级左右的穿越机上没有什么太大问题。
来一张全家福
附赠3m胶和线材,线材采用自锁扣,不容易松脱。
安装主控的双面胶最好用配套的,用别的双面胶可能会影响减震效果,据说乐迪固件有软件减震。
和标准版本大小对比一下:

确实小哦!体积和重量是他的优势,可以装在更小的载机上,体积小也更加便于安装和走线。
总结:开箱后给人的感觉还是挺ok的,飞控做工和用料都值这个价格,配件也挺齐全,但是不是颜值控的话也不会在意他用的塑料外壳,质感上略欠缺,功能模块都很集成,各个接口都是防呆插不用考虑接错,这点挺好,有几点建议,gps线材太硬,连接线的质感也比较硬,有可能容易疲劳断裂,毕竟作为飞机的大脑一款飞控更加重要的是稳定性和耐用性。
装机篇
装机配件:
机架:DALRC DL220
电调:好盈xrotor 30A
电机:好盈xrotor 2205 2300kv

首先装好分电板,注意绝缘,碳板会导电!

分电板和飞控连接很方便,直接插线不需要焊接,好评!

飞控拆壳后,做工尚可。


从硬件信息上看没有缩水配置
主处理器:STM32F405VGT6
陀螺仪:MPU6500
电子罗盘:QMC5883L
气压计:LPS22HB


焊接上电机电调

测试电机转向、调整。





完成图
总结:这款飞控装机可以说是很方便了,只需要焊接上电机电调就行,其他插上线头就好,然后各个模块的顺序也没问题,不会扯着线,更够完全协调的装进220中哦,剩余的空间再装一套图传摄像头完全没问题,对于穿越机新手而言,带GPS和增稳的飞机无疑是一大福音。
调参篇

对于之前没接触过 Pix 飞控的用户来说:
1、 首先安装地面站控制软件及驱动,熟悉地面站界面的各个菜单功能;
乐迪开发了专用版本的MissionPlanner软件,地址:http://www.radiolink.com.cn/firmware/MissionPlanner/MissionPlnaer-latest.exe
2、 仅连接 USB 线学会固件的下载;
3、 连接接收机和 USB 线完成飞控的遥控校准、加速度校准和罗盘校准;
4、 完成各类参数的设定;
5、 PID 参数调整;
6、 飞控各类高阶应用。

连接mission planner
主界面八个菜单按钮功能分别为:
1.飞行数据实时显示飞行姿态与数据;
2.飞行计划是任务规划菜单;
3. 初始设置用于固件的安装与升级以及一些基本设置;
4. 配置调试包含了详尽的 PID 调节,参数调整等菜单;
5. 模拟是给 Mini Pix 刷入特定的模拟器固件后,将 Mini Pix 作为一个模拟器在电脑上模拟飞行使用;
6. 终端是一个类似 DOS 环境的命令行调试窗口,功能非常强大。
以下是地面站必要做的几步:



一.校准imu即加速度计,最好准备一个边角整齐的方形硬纸盒,执行六个动作如图所示。

二. 选择机架类型,我是四轴。


说明书上有对应的转向和标号说明

三. 校准磁力计即罗盘,按每个轴都转360度即可,gps中还有一个磁力计,所以图中有两个坐标系。

旋转方法如图所示
注意:1.当出现进度条完成 100 后归 0 继续开始校准,说明此时校准动作或者安装附近有干扰罗盘因素可以尝试继续转动多次直到校准完成或设置 Fitness 选项为 Relaxed。
四. 飞行模式

Mini Pix 有多种可飞行模式可以选择,但一般只能设置六种,加上 CH7,CH8 的辅助,最多可以有八种。
配置界面中,六个飞行模式对应的 PWM 值,是否开启简单模式,超简单模式都一目了然,模式的选择只需要在下拉框中选择即可。一般第一个设置为 stabilize(自稳模式),其它 5 个请根据自己遥控习惯自行配置,但有一个原则,要保证你的模式切换开关随时能切换 Stabilize(自稳模式)上。
下面我着重介绍一下几个飞行模式:
1.自稳模式 Stabilize Mode
飞手用 roll 与 pitch 操作控制飞行器的倾斜角度。 当飞手松开 roll 与 pitch 摇杆时,飞行器将会自动水平。 在有风的环境中,飞手需要不断的修正 roll 与 pitch 以让模型定点停留。 飞手用 yaw 操作控制转向速率。 当飞手松开 yaw 摇杆时,飞行器将会保持它的朝向不变。 飞手的油门输入控制马达的平均转速,这意味着这如果想保持高度,需要不断的修正油门。 油门输入会根据模型的倾斜角度自动调整(比如在模型倾斜过大的时候会自动增大油门),以弥补飞手操作飞行器倾斜所带来的高度变化。
2.特技模式 Acro Mode(FPV)
特技模式是仅基于速率控制的模式。 特技模式提供了遥控器摇杆到飞行器电机之间的最直接的控制关系。 在特技模式下飞行,就像是不装飞控的遥控直升机一样,需要持续不断的手工摇杆操作。 此模式试用与翻滚,FPV 等快速飞行 。
3.高度保持模式 Altitude Hold
在高度保持模式(简称定高)模式下,主板会自动控制油门,从而保持高度不变。Roll、Pitch 和 yaw 的操作与自稳模式 一样。都是直接控制飞机的转动角度和朝向。自动高度保持是多种飞行模式(Loiter, Sport 等)的一种,所以这里的信息也适用于这些模式。飞控使用气压高度计测试结果作为高度基准。如果在飞行区域的气压出现变化,飞行器的飞行高度将会受气压变化的影响而不准确,飞行高度就不是实际的高度(除非另外安装了超声波测距,并且飞行高度小于 20英尺)。26 尺以下使用超声波测距会向飞行器提供更精确的飞行高度。
4.自动模式 Auto Mode
在自主(自动)模式,飞行器将会按照任务脚本飞行,需预先编写并储存在自动驾驶仪上,包含自主导航航点,命令,事件。自动模式可以让飞行器按照内部的任务脚本控制它的动作。 任务脚本可以是一组航点,也可以是非常复杂的动作如:起飞、旋转 X 次、照相等。
5.定点模式 PosHold Mode
就是GPS模式,当打开时,定点模式会自动试图保持当前位置、指向、高度。 要实现良好的留待性能,GPS 位置良好、罗盘上低电磁干扰、低振动都是非常重要的。
6.返航模式 RTL Mode
当切换到返航模式时,飞行器会返回家的位置。 默认情况下,在返航之前,飞行器会首先飞到至少 15 米的高度,或者,如果当前高度更高,就会保持当前高度。
7.简单和超简单模式 Simple and Super Simple Modes
“简单”模式和“超级简单”模式用于与稳定、运动、飘移、降落这些飞行模式结合使用,即我们理解的锁头模式,超简单模式对应的是基于家和模型的位置。
除此以外还有:
引导模式 Guided Mode
留待模式 Loiter Mode
绕圈模式 Circle Mode
飘移模式 Drift Mode
运动模式 Sport Mode
翻转模式 Flip
自动调参 AutoTune
降落模式 Land
制动模式 Break
抛飞模式 ThrowADSB
壁障模式 Avoid_ADSB
无 GPS 引导模式 Guided_NoGPS
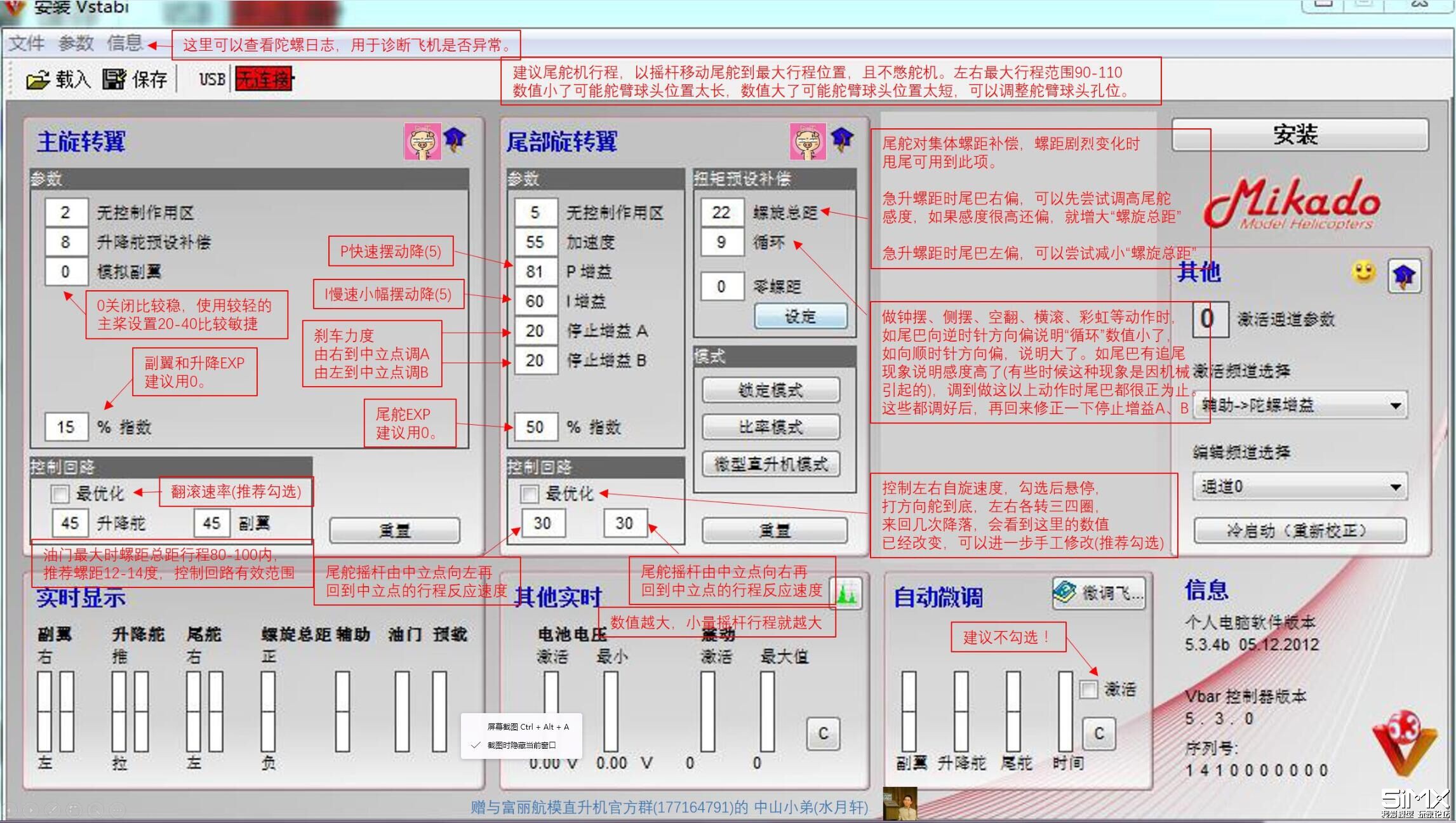
五. 调参

250轴距穿越机 推荐参数
试飞篇
PosHold模式下悬停精度展示
测试基于PosHold Mode 且飞控已经3D FIX,我们可以看到基本飞机不会有漂移,高度也不会有太大变化,我刷了乐迪官方的固件,其中有改进过的软件减震算法代码,因为我在飞控和机架之间并没有安装3m胶,可见减震效果很理想,飞机可以很好的定点悬停。
使用感受
总体来说,该飞控很好的继承了pixhawk的功能,并且将体积和重量控制的很到位,性价比很高,能够轻松安装于250穿越机上,mini m8n GPS也提供了足够的精度,飞控提供的分电板很好的提供了安装便捷性,分电板到飞控以及gps等全部采用自锁插头连接,可靠性很高,即使在穿越机高强度炸鸡情况下也不会掉,就目前炸鸡的情况来看,该飞控没有出现脱焊虚焊等问题,很适合会折腾的穿越玩家入手,接下来有机会我会装到FPV飞翼上进行尝试。

业界快讯 More
- 12-26 【5iMX新闻中心】卡勃力特发布6x6全轮驱动
- 12-26 品牌合作丨 Flysky&Sunpadow FS-ST8、FS-
- 08-15 航模行业新生力量!星奇世界发布 STARGAZER
- 10-26 FMS新品:1/12比例德国82型越野车
- 09-26 1:16 AVVX 验证型两栖战车中秋节正式服役

- 活动
- 精华
More
-
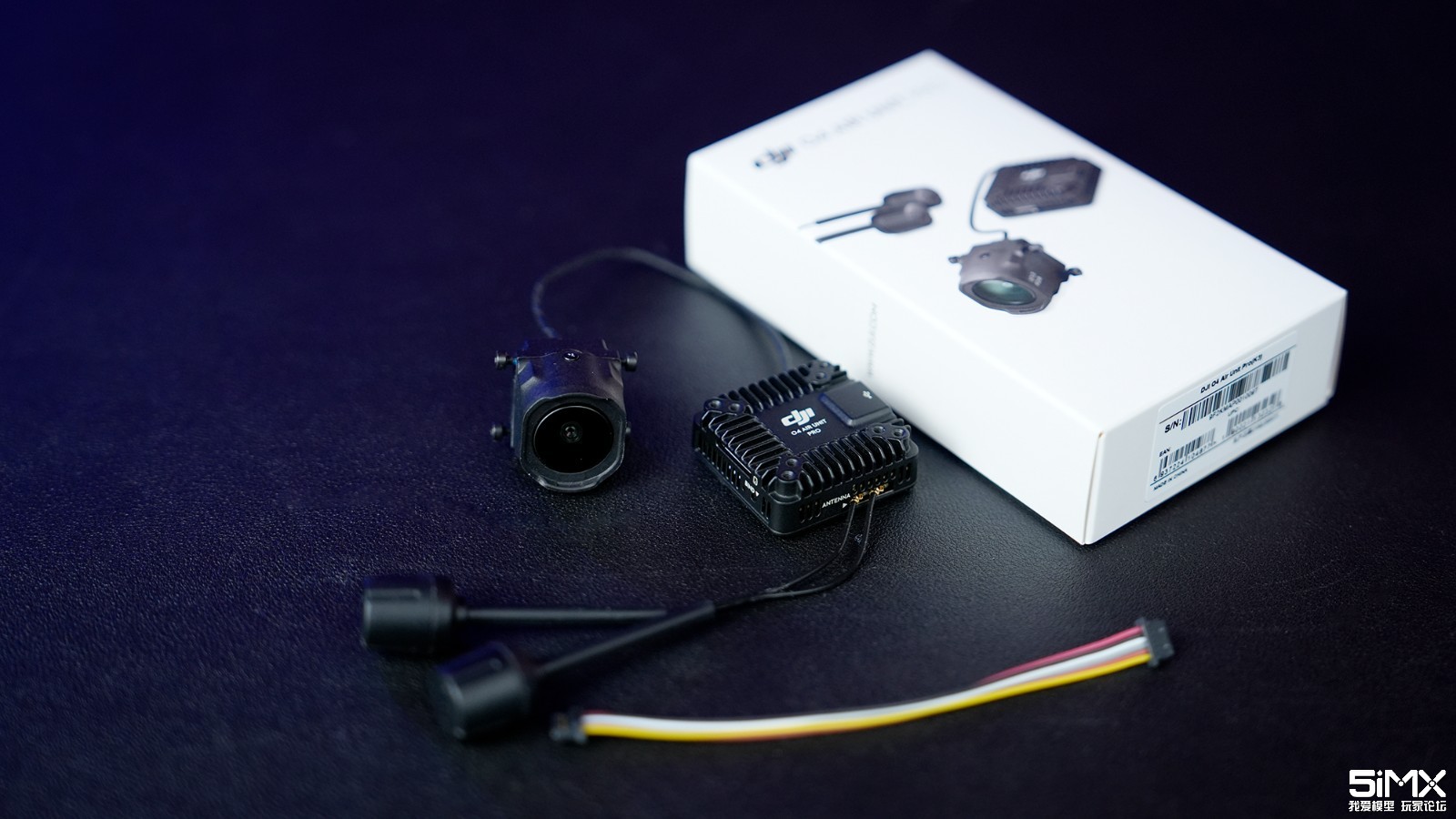
DJI最新O4 Air Unit Pro图传体验报告
-

新手入门好选择!仅售2980元的4轮驱动自卸
-
思卡新型高性能气囊装车实测:外观和姿态更
-
K8,kbar 三轴 陀螺仪 完整调试
-

-
阅读排行 More
-
01
翼载荷低的飞机就一定不抗风吗?
各路大大,好久不见。 最近在忙于生 ... -
02
5iMX签到帖(2025-04-28)
转向灯失灵了,由于您累计签到3980次, ... -
03
全合成润滑油隐藏多年的神秘面纱将要被揭开
有了DeepSeek,时代不同了,她什么都 ... -
04
三叶四冲发动机合成润滑油实验视频
1:4素油,PPG400合成润滑油。视频地址 ... -
05
小钻夹怎么加持大钻头
请教老师们,有个台湾志韦的台钻体积 ...
 /2
/2 

